🧱 openlane2-sram
Macro-Aware Physical Design with OpenLane2 (SRAM Hard Macro Integration)
🔗 Links
| Language | GitHub Pages 🌐 | GitHub 💻 |
|---|---|---|
| 🇺🇸 English |
📌 Project Overview
This repository demonstrates macro-aware physical design using OpenLane2 (v2)
by integrating an SRAM hard macro into a complete RTL → GDS flow.
The focus is not SRAM design, but realistic integration of a hard macro
(LEF / GDS / blackbox) into an OpenLane2-based physical design flow.
🎯 Project Goal
- ✅ Use OpenLane2 correctly and reproducibly
- 🧱 Treat SRAM as an external hard macro
- 🗺 Complete floorplanning, placement, and routing
- 📦 Generate a final GDS including the SRAM macro
- 📘 Document the entire process for reuse and education
📐 Scope
✔ What this project does
- 🛠 Install and run OpenLane2 (non-destructive setup)
- ▶ Execute a baseline OpenLane2 flow (standard-cell only)
- 🧠 Integrate an SRAM hard macro:
- Verilog blackbox
- LEF / GDS inclusion
- Fixed macro placement
- 🔗 Complete routing and GDS generation
- 📚 Provide step-by-step documentation
✖ What this project does NOT do
- ❌ Design or synthesize an SRAM
- ❌ Distribute proprietary SRAM macro files
- ❌ Perform full commercial sign-off (LVS / advanced DRC)
- ❌ Support legacy OpenLane (v1)
📚 Documentation Guide
Please read in the following order:
-
📘 Project Plan
Scope definition, milestones (M0–M3), and completion criteria. -
🛠 Environment Setup
OpenLane2 installation, Python environment, and PDK handling. -
▶ Baseline OpenLane2 Flow
Minimal RTL → GDS run without macros. -
🧠 SRAM Macro Integration
Blackbox declaration, LEF/GDS usage, and macro placement strategy. -
📊 Results and Observations
Final GDS, warnings, limitations, and lessons learned.
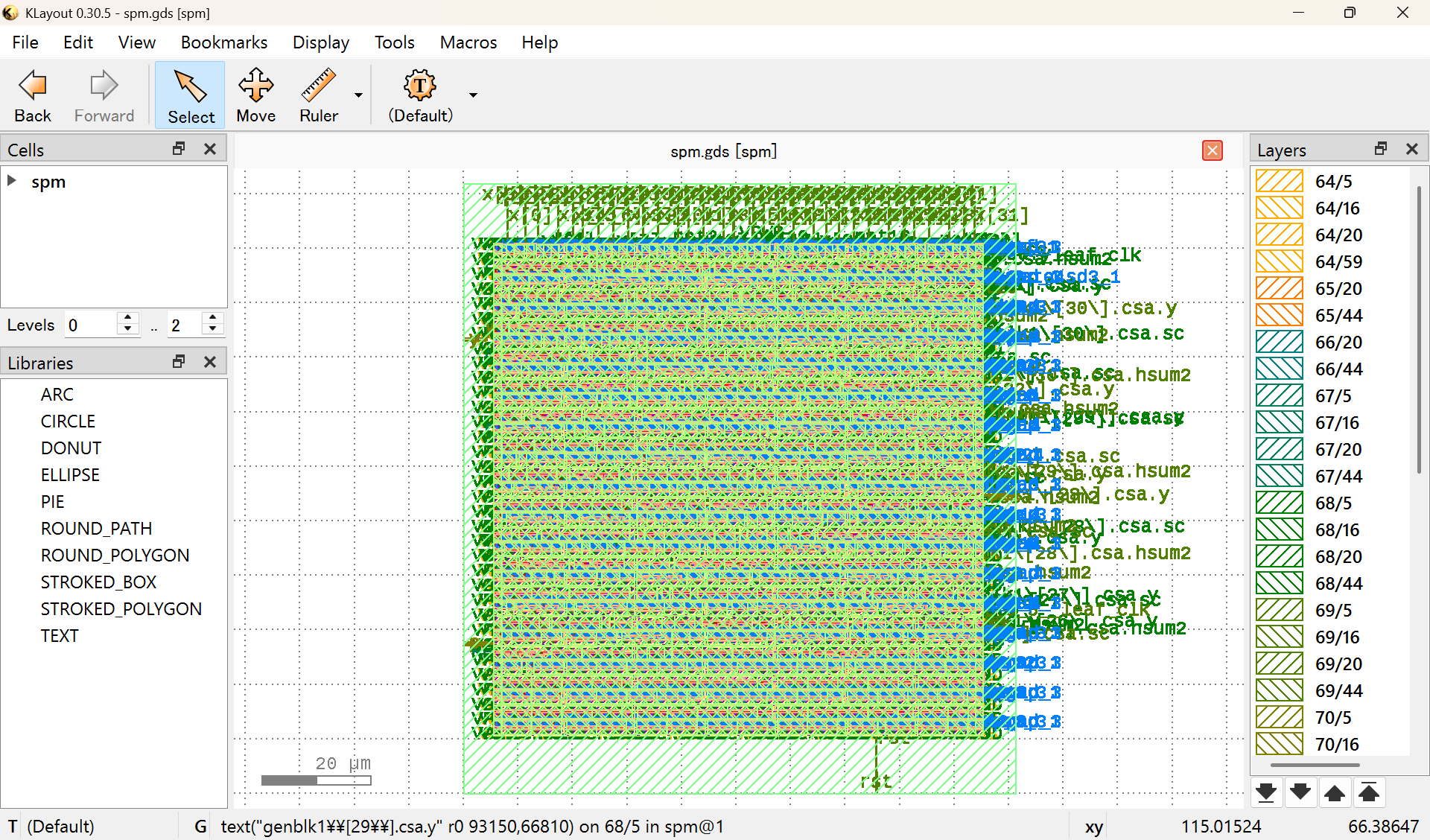
🖼 Figure 1: SRAM Macro Block-Level View
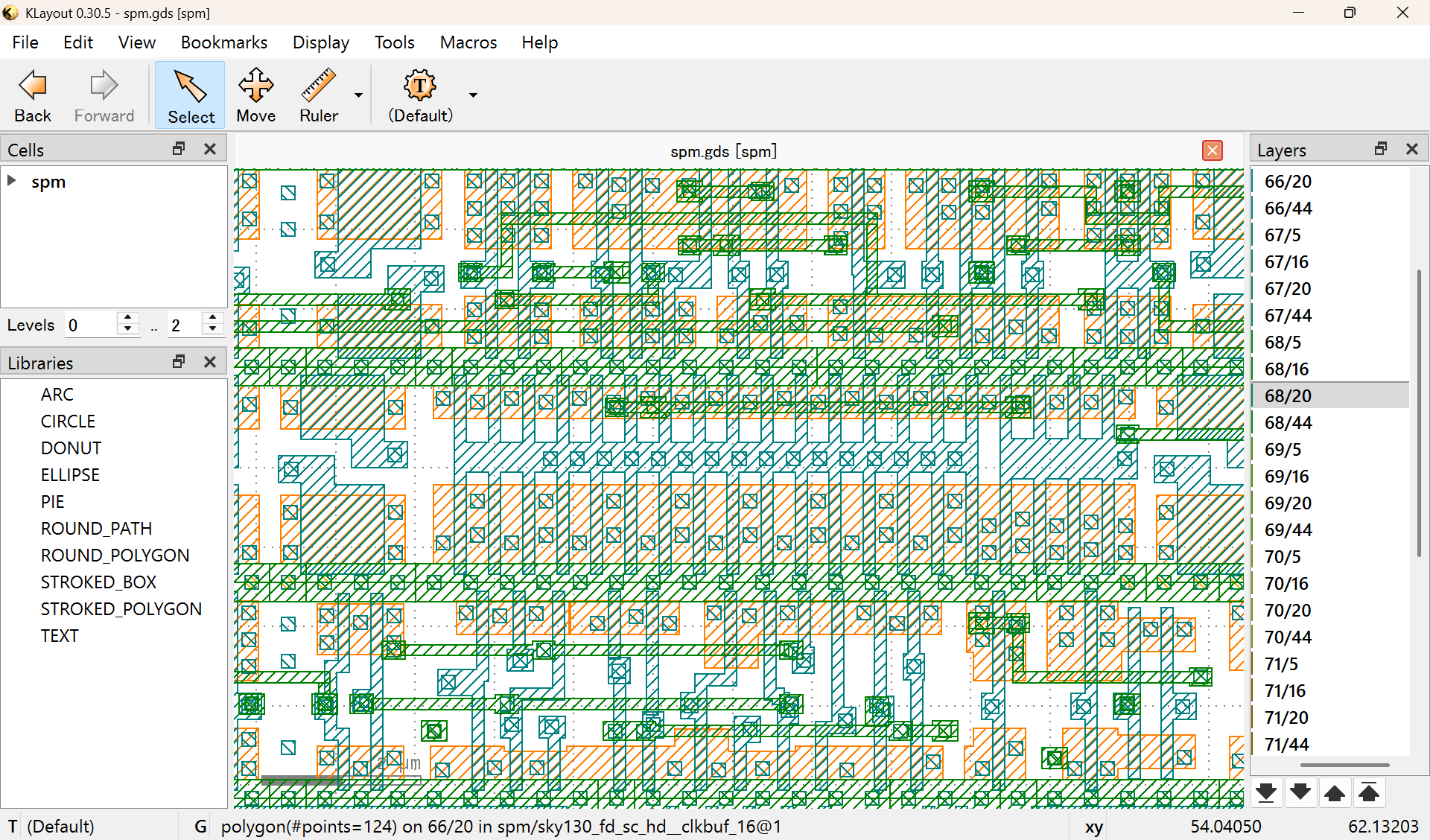
🔬 Figure 2: Standard-Cell / Transistor-Level View Around SRAM
🗂 Repository Structure
This repository is structured to clearly separate
documentation, design inputs, and generated artifacts.
📁 Top-Level
openlane2-sram/
├─ README.md
├─ docs/
│ ├─ 00_plan.md # Project scope and milestones
│ ├─ 10_env.md # Environment setup (OpenLane2, PDK)
│ ├─ 20_openlane2.md # Baseline OpenLane2 flow (no macros)
│ ├─ 30_macro_sram.md # SRAM hard macro integration
│ └─ 40_results.md # Results, warnings, lessons learned
│
├─ designs/
│ └─ spm/
│ ├─ config.json # Main OpenLane2 configuration
│ ├─ run_config.json # Runtime / flow options
│ ├─ pin_order.cfg # IO pin ordering
│ └─ src/
│ ├─ spm.v # Top-level RTL
│ └─ spm.sdc # Timing constraints
│
├─ runs/ # Generated by OpenLane2 (gitignored)
│ └─ RUN_YYYY-MM-DD_* # Per-run artifacts (logs, DEF, GDS)
│
└─ .gitignore
🏁 Milestones
- M0 🛠: OpenLane2 installation
- M1 ▶: Baseline RTL → GDS flow
- M2 🧱: SRAM macro integration and floorplanning
- M3 📦: Routing completion and final GDS generation
Each milestone produces verifiable artifacts.
🧠 SRAM Macro Policy
SRAM macros are treated strictly as external hard macros.
- 🚫 No SRAM GDS / LEF files are included
- 🔗 Users must provide or link their own macros
- 📘 This repository documents integration methodology only
This keeps the project license-safe and reusable.
🧩 PDK
- 🎯 Target PDK: Sky130
- 🚫 PDK files are not included
- 💻 The flow assumes an existing local PDK installation
🎓 Intended Audience
- 🛠 OpenLane2 / OpenROAD users moving beyond standard-cell-only flows
- 🧠 Engineers learning macro-aware floorplanning
- 📘 Educators preparing realistic physical design examples
📊 Status
✔️ Baseline flow and SRAM macro integration verified
This repository evolves incrementally with emphasis on
clarity, reproducibility, and realistic physical design practice.
👤 Author
| 📌 Item | Details |
|---|---|
| Name | Shinichi Samizo |
| Expertise | Semiconductor devices (logic, memory, high-voltage mixed-signal) Thin-film piezo actuators for inkjet systems Printhead productization, BOM management, ISO training |
| GitHub |
📄 License
| 📌 Item | License | Description |
|---|---|---|
| Source Code | MIT License | Free to use, modify, and redistribute |
| Text Materials | CC BY 4.0 or CC BY-SA 4.0 | Attribution required; share-alike applies for BY-SA |
| Figures & Diagrams | CC BY-NC 4.0 | Non-commercial use only |
| External References | Follow the original license | Cite the original source properly |
💬 Feedback
Suggestions, improvements, and discussions are welcome via GitHub Discussions.