【Control】⏱️ 05. Why “Timing-Only Control” Fails Under Friction Aging
topics: [“control engineering”, “PID control”, “reliability”, “simulation”]
Introduction
A control system is not acceptable simply because it “moves.”
In long-term operation, what breaks first is often when it moves—its timing.
In this article, we compare:
- Conventional PID control
- AITL control (FSM-based gain retuning)
on a plant subjected to friction aging equivalent to 1000 days, and show a case where:
A control strategy that appears successful actually collapses as a reliability control.
🎯 Objective of the Experiment
The objective is not accuracy improvement.
Can response timing (Δt) be preserved under long-term degradation?
This question is evaluated explicitly from a Reliability perspective.
🧪 Experimental Conditions (Key Points)
Degradation Model
- Increase in Coulomb friction and static friction
- Degradation level: equivalent to 1000 days
Controllers Compared
- Initial: PID designed at day = 0
- PID_only: fixed gains applied after degradation
- AITL: FSM-based gain retuning (naive implementation)
📉 Results: Timing Degradation (Δt)
The comparison result is shown below.
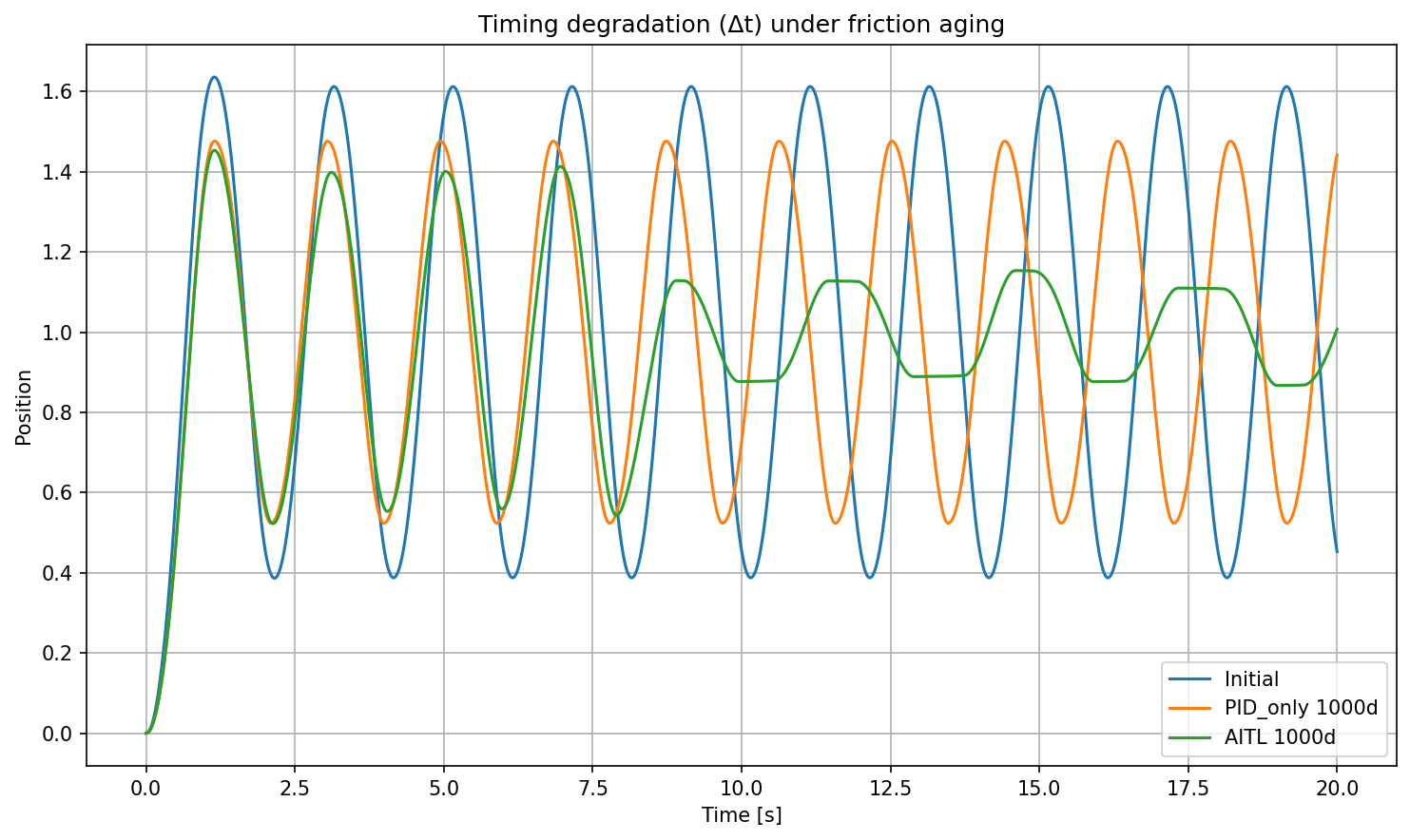
- PID_only
- Response amplitude is preserved
- However, peak timing gradually drifts, accumulating Δt
- AITL
- Peak timing remains close to the initial response
- Δt is suppressed
At first glance, AITL appears to be a “success.”
⚠️ But What Actually Happened
Closer inspection of the AITL response reveals:
- Reduced amplitude
- Sluggish motion
- Emergence of flat (inactive) regions
In other words:
Timing was preserved at the cost of controllability.
❓ Why Did This Happen?
The reason is straightforward.
- AITL optimized only Δt (timing) as its objective
- Amplitude, saturation, and control effort were not evaluated
As a result:
Timing-oriented retuning alone can collapse motion authority.
This is not a bug—it is an inevitable design failure.
🧠 What Reliability Control Really Means
This result makes one thing clear:
Reliability Control ≠ optimization of a single metric
At minimum, the following must be considered jointly:
- Δt (timing)
- Amplitude (controllability)
- Saturation ratio (health margin)
- Stability of retuning behavior
Reliability Control is therefore a constrained multi-objective design problem.
🧩 Design Lessons Learned
- Preserving Δt alone does not constitute reliability control
- Gain retuning is not mere tuning—it is a design action
- FSMs must detect not only degradation, but also overcorrection
That’s All for This Article
In this article, we clarified:
- Where naive AITL control breaks down
- What perspectives are essential for Reliability Control
Next, we will move on to:
Designing a Reliability FSM with amplitude and saturation constraints
🔗 References
-
GitHub (Code and Reproducible Environment)
https://github.com/Samizo-AITL/aitl-controller-a-type -
Detailed Analysis (GitHub Pages)
https://samizo-aitl.github.io/aitl-controller-a-type/docs/reliability/demo_friction_aging_analysis.html