【Semiconductor】🧪 09. OpenLane superstable
— Verifying “Minimal RTL → GDS” with Pre-Declared Conditions
topics: [“OpenLane”, “SKY130”, “EDA”, “Semiconductor”, “VLSI”]
🧭 Introduction
When working with OpenLane, the following questions naturally arise:
- “Does this flow really complete with ordinary RTL?”
- “Does it require extensive tuning to work?”
- “Are reported success cases adjusted after seeing the results?”
When reading articles about EDA flows,
it is not uncommon to find cases where conditions are tweaked after success is observed.
In this experiment, we therefore asked a stricter question:
If we pre-declare a minimal, self-written RTL design and fixed constraints,
can OpenLane superstable truly complete the flow from RTL to GDS without modification?
🧩 What Was Done (Key Points)
The experiment was intentionally simple.
- Prepare a self-written minimal RTL (a counter)
- Fix all constraints before execution
- Run OpenLane superstable without any modification
- Judge success only by whether a GDS is generated
Performance evaluation and optimization were
explicitly excluded from the scope of this verification.
📌 What “Pre-Declaration” Means
The key concept here is pre-declaration.
This is not an official OpenLane term, but refers to:
Deciding the RTL, constraints, and success criteria
before seeing any results
📝 Pre-Declared Items
- RTL contents (no post-editing)
- Constraints such as clock period and utilization (no post-tuning)
- Success criterion: “A GDS is generated” — nothing more
This explicitly avoids:
- Relaxing constraints if the run fails
- Presenting only hand-tuned configurations as “success stories”
🧱 Design Contents (Minimal RTL)
The design is truly minimal.
| Item | Description |
|---|---|
| Function | Free-running counter |
| FSM | None |
| Clock | Single clock |
| Reset | None (simulation-only initialization) |
| Macros | Not used |
RTL file:
rtl/spm_min_counter.v
⏱ Pre-Fixed Constraints
| Item | Value |
|---|---|
| Clock period | 10 ns (100 MHz) |
| Core utilization | 30% |
| Aspect ratio | 1.0 |
Configuration file:
openlane/config.tcl
🧪 RTL Simulation (Testbench)
spm_min_counter/
├─ README.md
├─ rtl/
├─ sim/
│ ├─ tb_spm_min_counter.v
│ ├─ run.sh
│ └─ wave/
├─ openlane/
├─ runs/
├─ results/
└─ run_log/
Testbench Policy
- RTL not modified
- No reset added
- Simulation-only initialization only
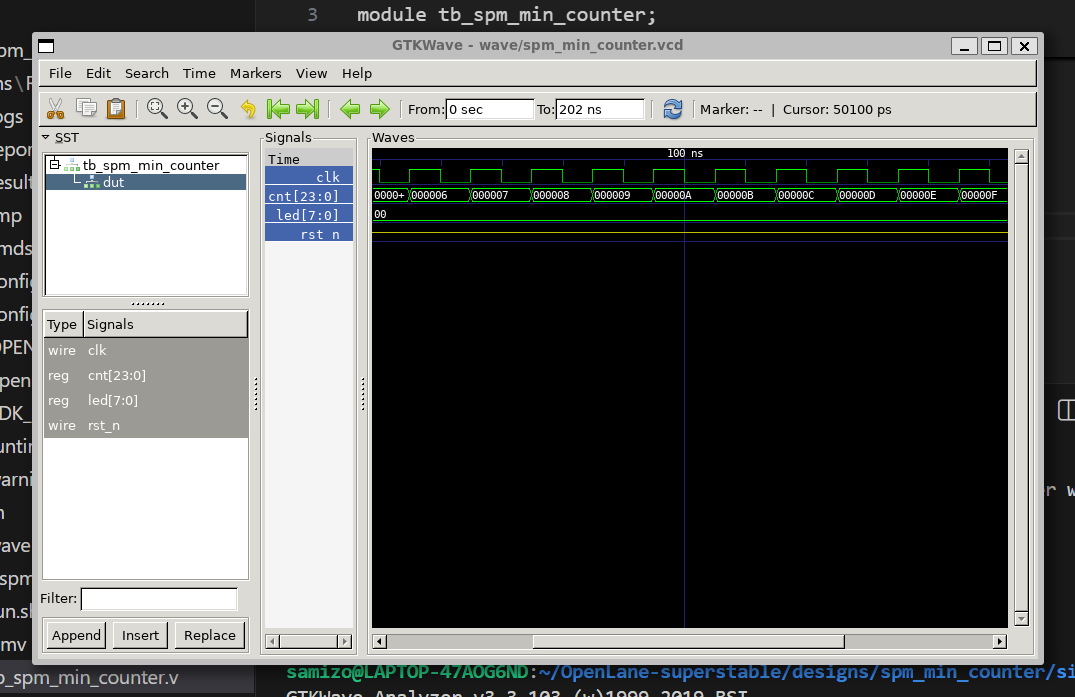
📈 GTKWave Waveform
🧩 OpenLane Execution Results
- RTL → GDS completed
- DRC / LVS passed
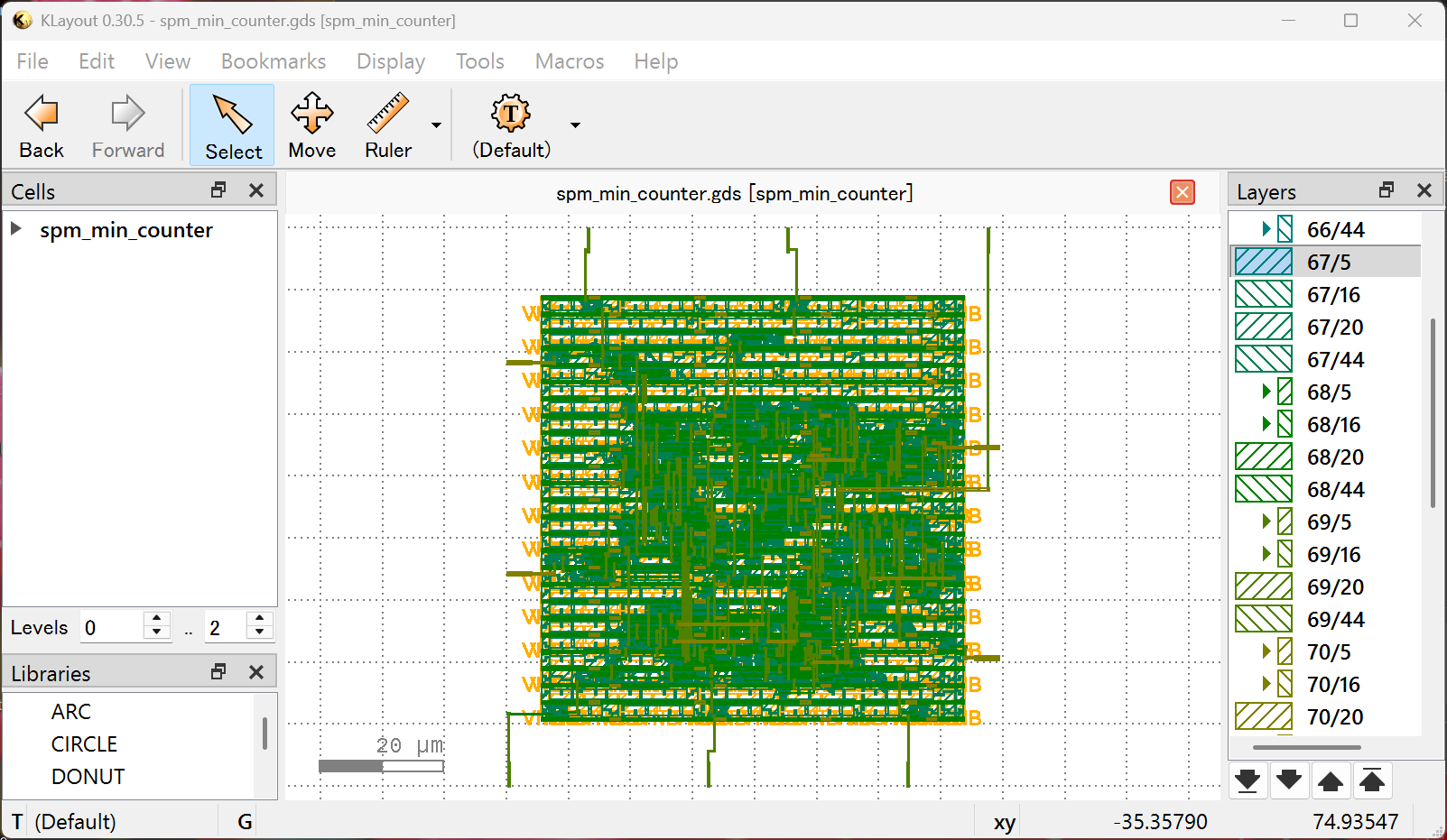
🗺 KLayout Layout View
📝 Summary
This verification confirms that OpenLane superstable:
- Can complete RTL → GDS
- With a minimal RTL design
- Under pre-declared, fixed conditions
- Without post-hoc tuning or modification