【ハードウエア】🧱 02. aitl-physical-reference v1:なぜ"まだ制御しない"のか
topics: [“hardware”, “pcb”, “kicad”, “control”, “aitl”]
📌 はじめに
aitl-physical-reference v1 は、
「制御できそうで、まだ制御しない」ところに意図的に留めた基板です。
それは未完成だからではありません。
設計上の判断です。
制御を入れる前に、
まだ固定すべき物理が残っている。
v1 は、その境界を明確にするためのリファレンスです。
🔄 v0 から v1 で何が変わったか
v0 では、次を最小構成で固定しました。
- 電圧は測定されるもの
- 電流は抵抗で制限されるもの
- 物理的境界は PCB 外形で決まるもの
v1 では、そこから一歩進みます。
- 論理信号は 外部に出せる
- 観測点は より明示的になった
- しかし 振る舞いは定義していない
「制御できそう」な状態を、
あえて未確定のまま露出させる。
それが v1 です。
❓ なぜ、まだ制御を入れないのか
PID、FSM、AI制御。
いずれも「出力をどう変えるか」を扱います。
しかしその前に、次が固定されていなければなりません。
- どこを測っているのか
- その電圧・電流は再現可能か
- 銅配線という物理制約を越えていないか
制御は 選択 ですが、
物理は 前提 です。
v1 は、その前提を曖昧にしないために
制御を入れない という選択をしています。
1️⃣ Schematic(v1):論理は出した、振る舞いは書かない
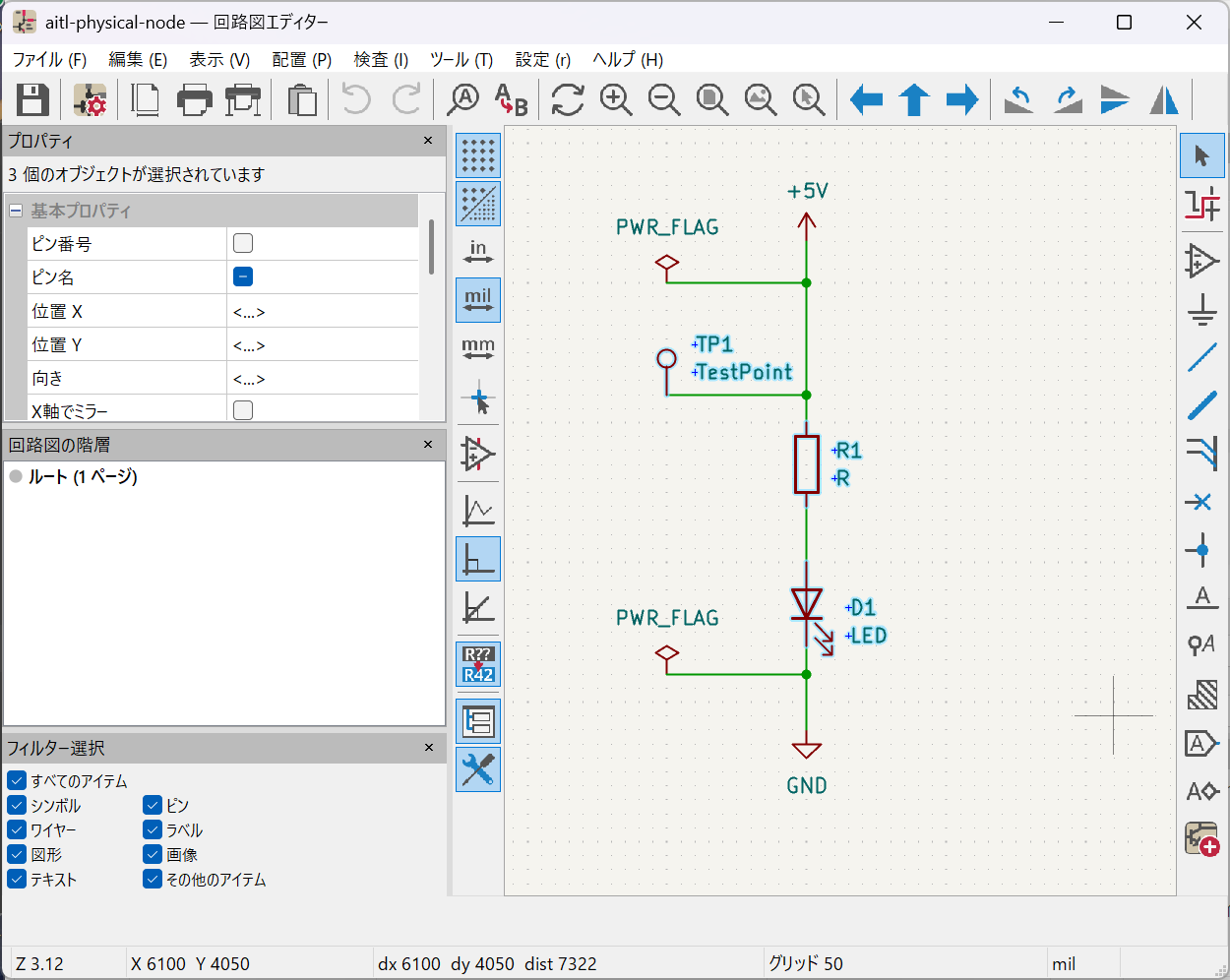
論理信号は、ここで初めて明示的に外部へ出ています。
しかし、
- 状態遷移は定義していない
- フィードバックも存在しない
- 時間応答も決めていない
「制御できそう」という錯覚 だけを許し、
制御そのものは、まだ存在しません。
2️⃣ PCB Layout(v1):銅配線が自由度を縛る
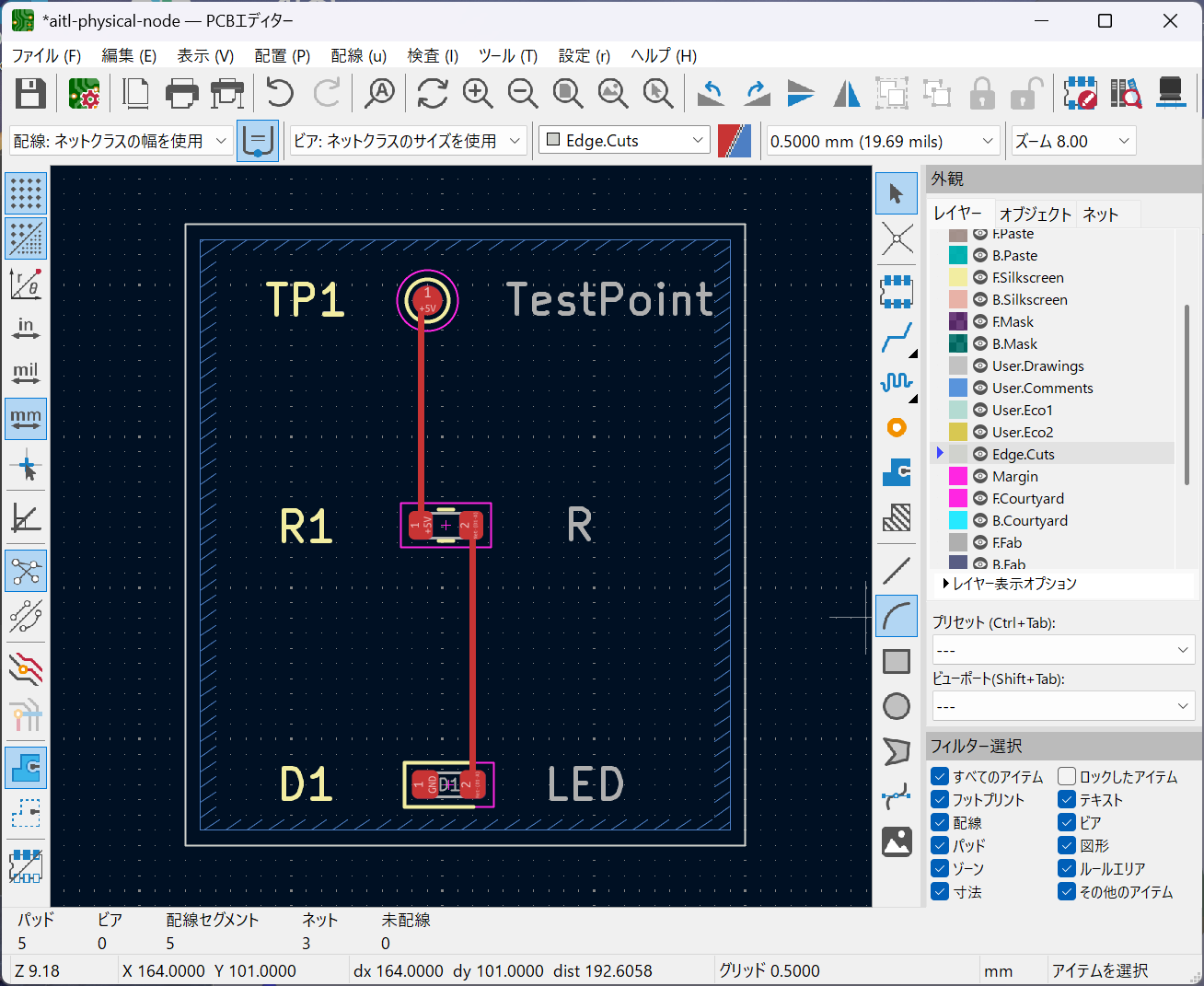
論理が増えても、
電流が流れるのは この銅の上だけ です。
- 配線長
- リターンパス
- 部品配置
- 基板外形
これらは、制御ロジックでは回避できません。
制御の自由度は、物理で静かに制限される。
それを可視化するためのレイアウトです。
3️⃣ 3D View(v1):実体はある、だが制御は始まらない
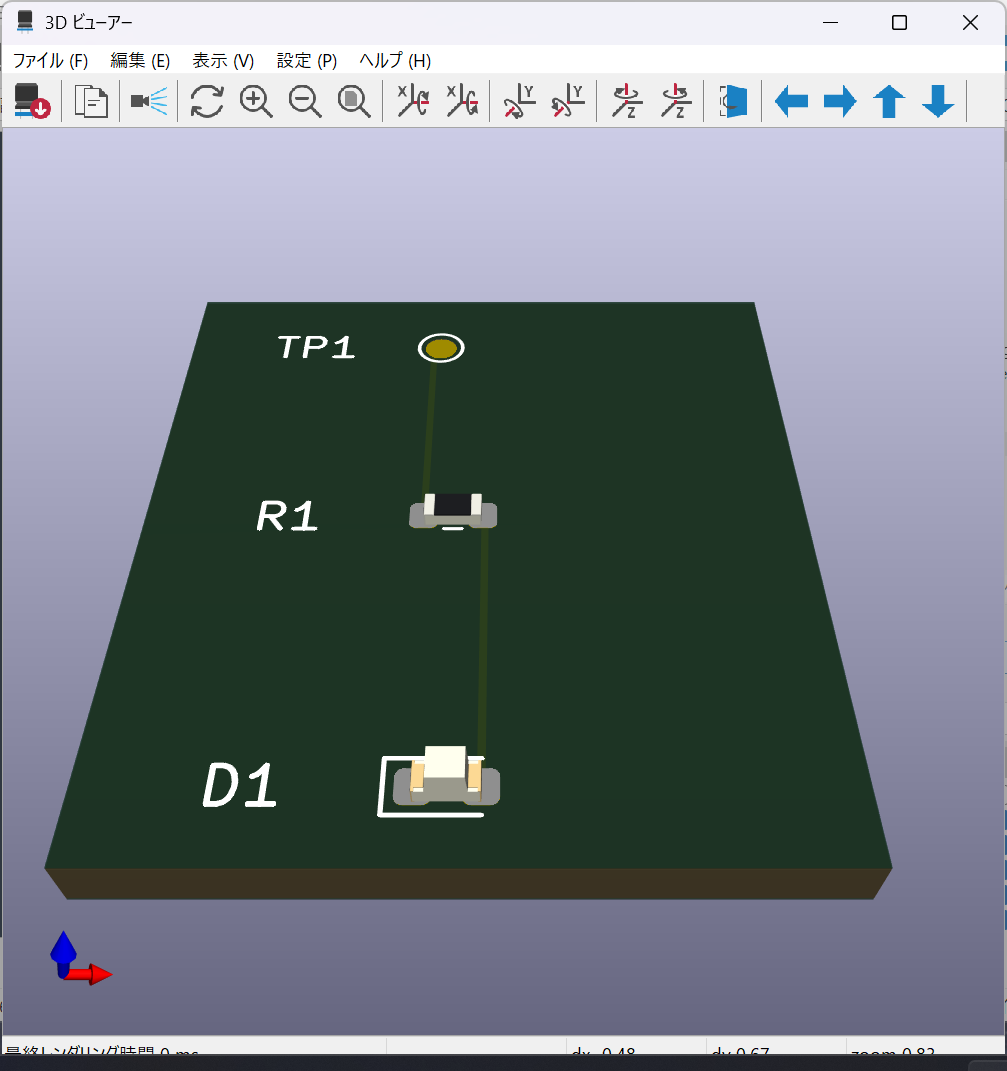
高さがあり、
触れる部品があり、
測れる位置がある。
しかし、この基板は
まだ何も振る舞いません。
「実装できた=制御できる」
という誤解を、ここで止めます。
🧭 v1 の正体:境界定義リファレンス
aitl-physical-reference v1 は、
- MCU 評価ボードではありません
- 制御デモ基板でもありません
これは、
論理と物理の境界を確定させるリファレンス
です。
- Test Point は「観測境界」
- 抵抗は「物理制約」
- PCB outline は「世界の端」
制御が踏み込む前に、
越えてはいけない線を引く板です。
🧩 AITL における位置づけ
AITL(Architecture for Integrated Technology Logic)では、
- Physical layer
- Logical layer
- Adaptive layer
を明確に分離します。
v1 は、その最下層。
Physical layer の基準点です。
ここが固定されて初めて、
上位の制御や推論が意味を持ちます。
⏭️ 次に来るもの
v2 では、初めて 振る舞い が入ります。
- しかし、まだ AI ではありません
- まだ最適化もしません
まず入るのは、
人間が説明できる制御です。
🧾 まとめ
制御を入れなかったのは、
まだ「固定すべき物理」が残っていたからです。
aitl-physical-reference v1 は、
制御に進むために、立ち止まる設計。
制御以前に、
物理がどう存在するか。
その境界を示すための、
v1 リファレンスです。
🔗 リンク
-
GitHub Pages
https://samizo-aitl.github.io/aitl-physical-reference/ -
GitHub Repository
https://github.com/Samizo-AITL/aitl-physical-reference