【制御】⏱️ 05. 摩擦劣化下で“タイミングだけ守る制御”が破綻する理由
topics: [“制御工学”, “PID制御”, “信頼性”, “シミュレーション”]
はじめに
制御系は「動けばOK」ではありません。
長期運用では「いつ動くか(タイミング)」が壊れます。
本記事では、摩擦劣化(1000日相当)を与えたプラントに対し、
- 従来の PID 制御
- AITL(FSM によるゲイン再調整)
を比較し、
一見うまくいった制御が、実は信頼性制御として破綻していた
という事例を紹介します。
🎯 実験の狙い
目的は 精度向上ではありません。
経年劣化下で、応答タイミング(Δt)を保てるか?
これを 信頼性(Reliability) の観点で評価します。
🧪 実験条件(要点のみ)
劣化モデル
- クーロン摩擦・静止摩擦の増加
- 劣化量:1000日相当
比較対象
- Initial:day = 0 で設計した PID
- PID_only:劣化後もゲイン固定
- AITL:FSM によるゲイン再調整(ナイーブ実装)
📉 結果:タイミング劣化(Δt)
以下が結果の比較図です。
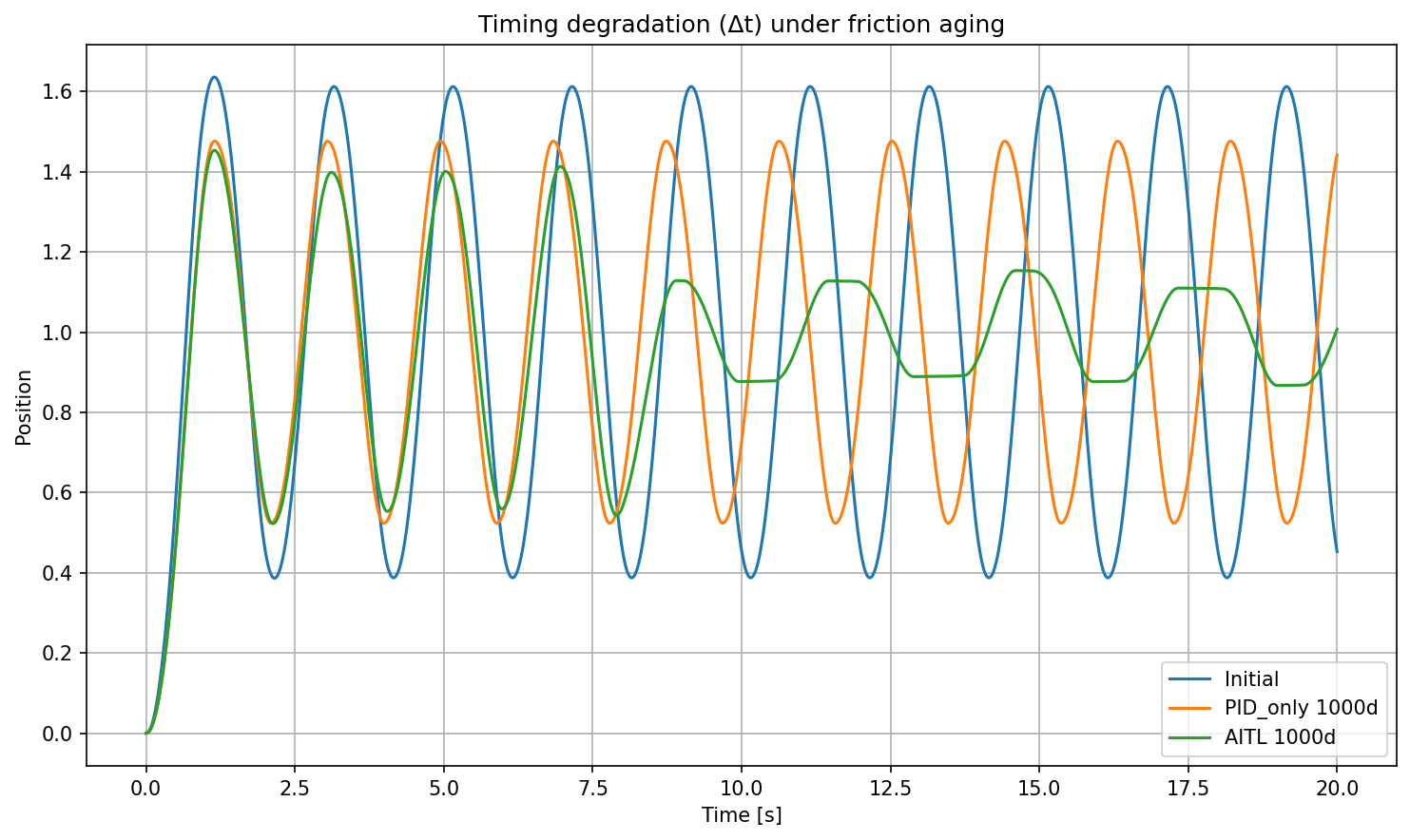
- PID_only
- 応答振幅は保たれる
- しかしピーク時刻が徐々に遅れ、Δt が蓄積
- AITL
- ピークタイミングは初期状態に近い
- Δt は抑制される
一見すると、AITL は「成功」に見えます。
⚠️ しかし、何が起きたか
AITL の応答をよく観察すると、
- 振幅が縮小
- 動きが鈍化
- 平坦な区間が現れる
つまり、
タイミングは守ったが、可制御性を犠牲にした
状態になっています。
❓ なぜこうなるのか
原因はシンプルです。
- AITL が Δt(タイミング)だけを目的に最適化している
- 振幅・飽和・制御エネルギを評価していない
その結果、
Timing-oriented retuning alone can collapse motion authority.
(タイミングだけを守る再調整は、運動能力を破壊する)
これは バグではなく、設計上の必然的な失敗です。
🧠 Reliability Control とは何か
この結果から分かることは明確です。
Reliability Control = 単一指標の最適化ではない
考慮すべき要素は少なくとも以下を含みます。
- Δt(タイミング)
- 振幅(可制御性)
- 飽和率(健全性)
- 再調整の落ち着き(安定した運用)
これらを 制約付きで同時に扱う設計問題です。
🧩 設計上の教訓
- Δt だけを守っても「信頼性制御」にはならない
- ゲイン再調整は単なる調整ではなく 設計行為
- FSM は劣化検知だけでなく 「やり過ぎ検知」 が必要
今回はここまで
本記事では、
- ナイーブな AITL が どこで破綻するか
- Reliability Control に必要な視点
までを整理しました。
次回は、
振幅・飽和を制約とした Reliability FSM の設計
に進む予定です。