【半導体】🧪 09. OpenLane superstable を
―「最小RTL → GDS」で事前宣言検証してみた
topics: [“OpenLane”, “SKY130”, “EDA”, “半導体”, “VLSI”]
🧭 はじめに
OpenLane を触っていると、こんな疑問が出てきます。
- 「結局、このフローは 普通の RTL でも最後まで流れるのか?」
- 「チューニングしないとダメなんじゃないか?」
- 「成功例って、あとから条件を調整してない?」
EDA フローの紹介記事を見ていると、
結果が出たあとで条件が調整されているケースも少なくありません。
そこで今回は、
最小限の自作 RTL を「事前に宣言」した状態で OpenLane superstable を流し、
RTL → GDS まで本当に完走するのか
を検証しました。
🧩 今回やったこと(要点)
やったことは非常にシンプルです。
- 自作の 最小 RTL(カウンタ) を用意
- 制約条件を 実行前に固定
- OpenLane superstable を改変せずに実行
- 成否は 「GDS が出るかどうか」だけで判断
性能評価や最適化は、
今回の検証対象には含めていません。
📌 「事前宣言」とは何か
今回のキーワードは 事前宣言 です。
これはツールの正式な用語ではなく、
結果を見る前に、
RTL・制約・成功条件を決めておくこと
を意味しています。
📝 事前に決めたこと
- RTL の中身(あとから変えない)
- クロック周期・util などの制約(あとからいじらない)
- 成功条件は 「GDS が出ること」だけ
つまり、
- 「流れなかったら条件を緩める」
- 「通った設定だけを成功例として出す」
といった 後出し解釈をしないための約束です。
🧱 設計の中身(最小 RTL)
設計は 本当に最小限です。
| 項目 | 内容 |
|---|---|
| 機能 | フリーランニング・カウンタ |
| FSM | なし |
| クロック | 単一 |
| リセット | なし(simulation-only 初期化) |
| マクロ | 使用しない |
RTL:
rtl/spm_min_counter.v
⏱ 事前に固定した制約
| 項目 | 値 |
|---|---|
| クロック周期 | 10ns(100MHz) |
| Core utilization | 30% |
| Aspect ratio | 1.0 |
設定ファイル:
openlane/config.tcl
🧪 RTL シミュレーション(テストベンチ)
spm_min_counter/
├─ README.md
├─ rtl/
├─ sim/
│ ├─ tb_spm_min_counter.v
│ ├─ run.sh
│ └─ wave/
├─ openlane/
├─ runs/
├─ results/
└─ run_log/
テストベンチ方針
- RTL 非改変
- reset 追加なし
- simulation-only 初期化のみ
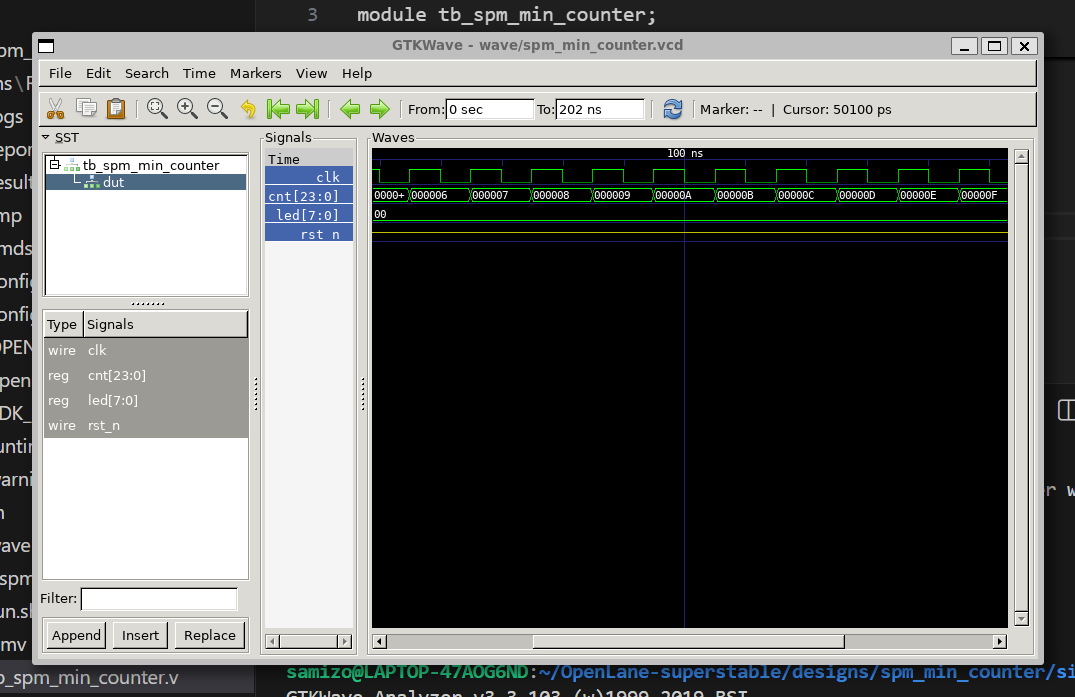
📈 GTKWave 波形
🧩 OpenLane 実行結果
- RTL → GDS 完走
- DRC / LVS Pass
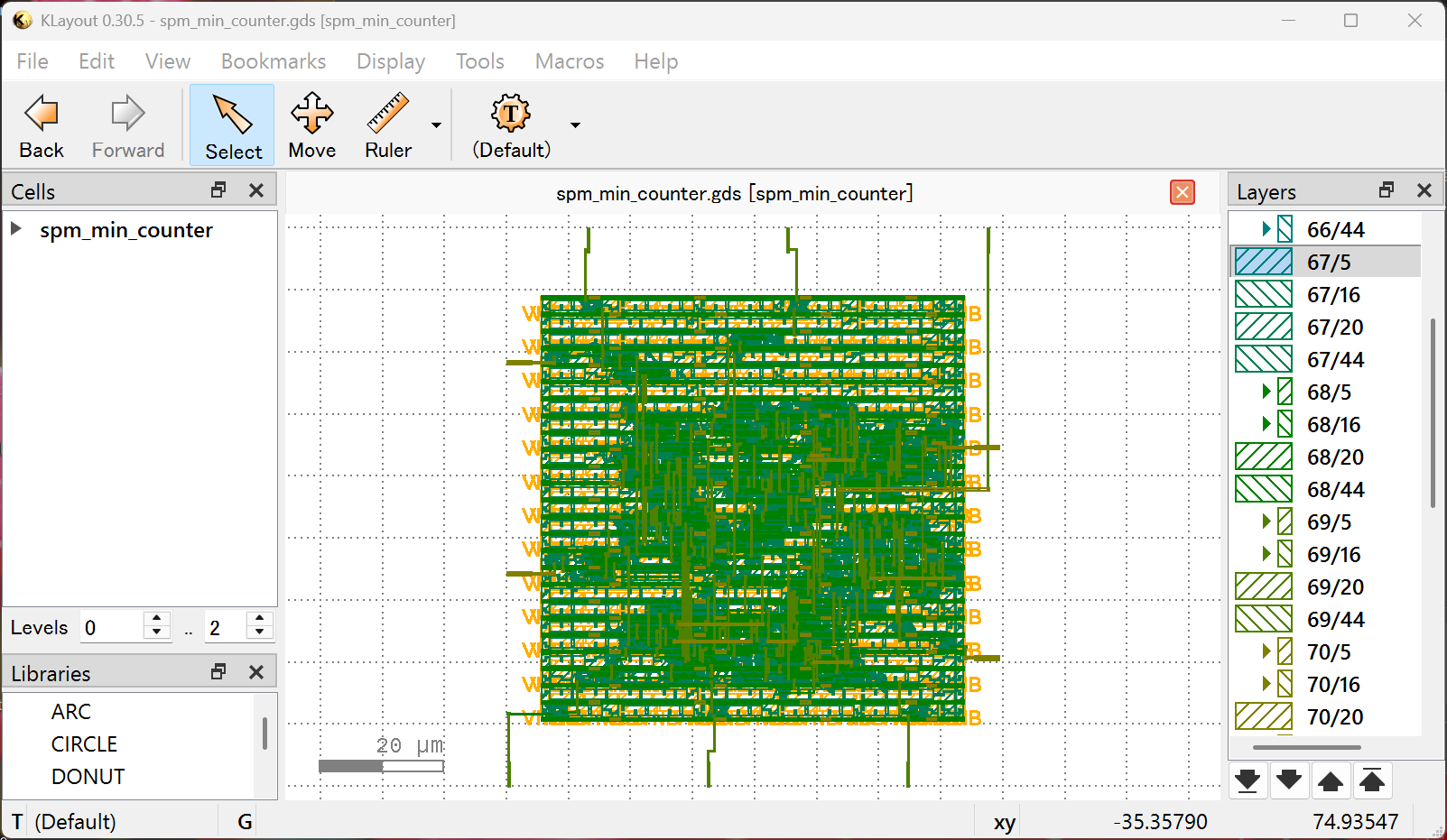
🗺 KLayout レイアウト
📝 まとめ
本検証により、OpenLane superstable は
最小 RTL でも、事前宣言条件下で RTL → GDS を完走可能
であることを確認しました。