Reliability Analysis — AITL under Plant Aging (1000 days)
This section provides a reliability-oriented analysis of the
AITL Controller A-Type under long-term plant degradation,
modeled as friction aging equivalent to 1000 days.
Unlike conventional performance-driven evaluations,
the focus here is on temporal reliability:
- ⏱️ timing consistency (Δt)
- 🎛️ motion authority preservation
- 🚫 explicit decisions on when adaptation should be stopped
🔗 Links
| Language | GitHub Pages 🌐 | GitHub 💻 |
|---|---|---|
| 🇺🇸 English |
🎯 Purpose and Scope
The goal of this analysis is not to optimize controller performance.
Instead, it aims to answer the following design questions:
- How does plant aging affect response timing?
- What does adaptive control actually preserve?
- When does adaptation begin to harm reliability?
- Can this degradation be quantified and detected by design?
The analysis compares:
- fixed-gain PID control
- AITL control with FSM-based adaptive gain retuning
under identical friction aging conditions.
🧩 Analysis Structure (Demo Mapping)
This reliability study is organized as a design-to-evidence sequence, linking architectural intent to reproducible results.
Rather than independent experiments, each demo represents a progressive refinement of reliability reasoning.
| Demo | Artifact | Role |
|---|---|---|
| 12 | 12_vi_current_control_sales_demo.py |
Phenomenon visualization (waveforms under aging & disturbance) |
| 13 | 13_aging_sweep_delta_t.py |
Quantitative reliability metrics (Δt, max|e| vs aging) |
| 15 | 15_fsm_explainability_demo.py |
Explainable supervisory decisions (FSM transition rationale) |
| — | (design synthesis) | Reliability boundary identification (motivation for B-Type) |
Interpretation
- Demo 12 answers what happens under aging and disturbance
- Demo 13 quantifies how reliability degrades using explicit metrics
- Demo 15 explains why supervisory decisions occur, enabling auditability
Together, these demos establish that:
- performance recovery alone is insufficient to guarantee reliability
- temporal consistency (Δt) must be monitored explicitly
- adaptive actions require design-time permission and stopping logic
This sequence defines the design boundary of the A-Type controller and provides the evidence base motivating a reliability-oriented B-Type architecture.
Each demo builds on the previous one and represents a
design-phase progression, not isolated experiments.
🔬 Demonstration Results (Reproducible Evidence)
This section presents direct, reproducible results generated from the
Python demos in demos/ and stored in data/.
All figures below are auto-generated and traceable to code.
1️⃣ V–I Current Control under Aging & Disturbance
Waveform comparison of Fixed PID / PID×FSM / AITL under:
- resistance (friction-equivalent) aging
- external current disturbance
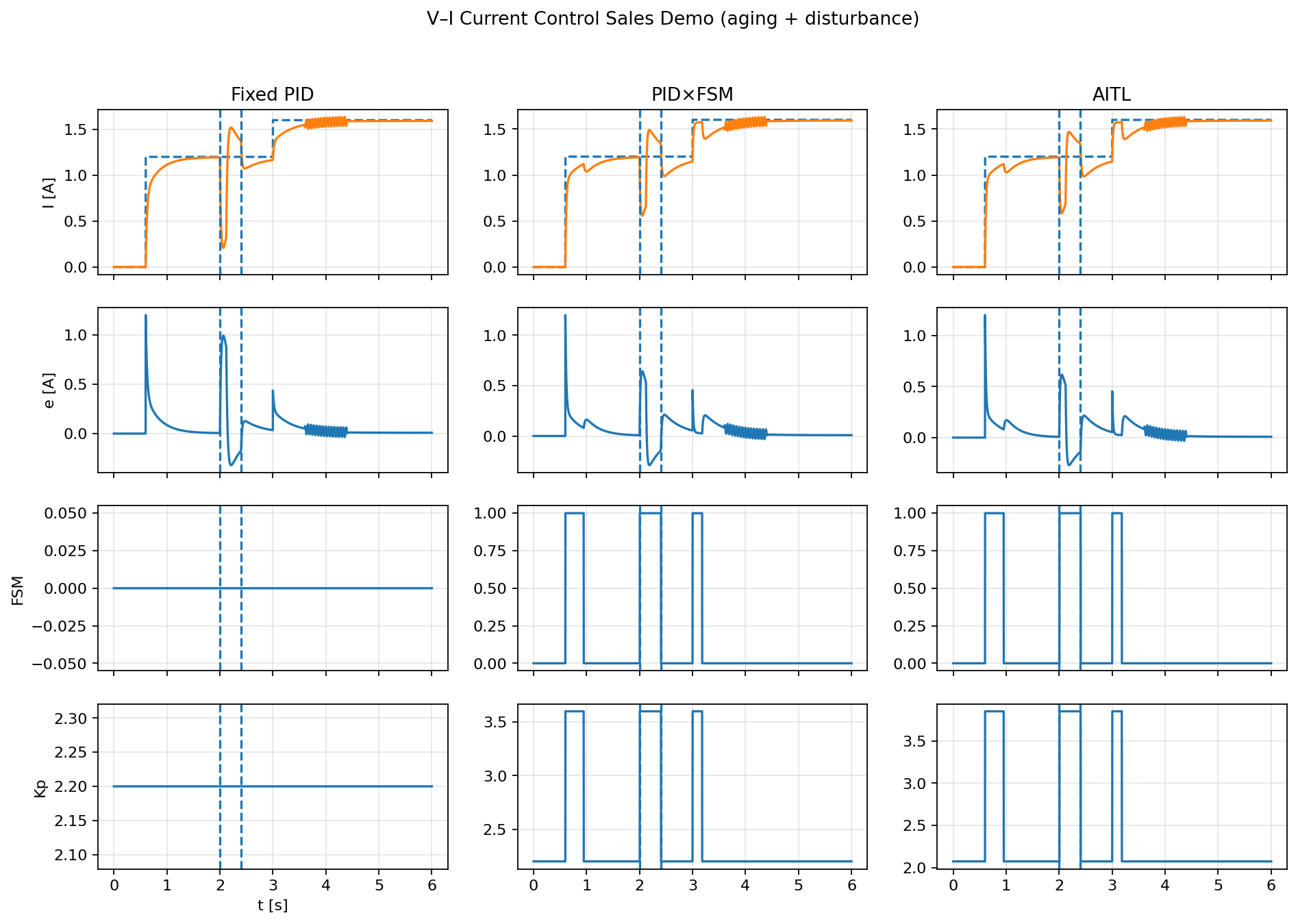
Observations
- Fixed PID: recovery depends on nominal tuning
- PID×FSM: supervised gain switching improves robustness
- AITL: adaptive recovery under degradation
⚠️ Waveforms alone are not sufficient to judge reliability.
Quantitative metrics follow.
2️⃣ Reliability & Safety Metrics vs Aging (Δt, max|e|)
Aging sweep over resistance step ratio (ΔR/R0), evaluating:
- Δt: recovery/settling time (temporal reliability)
- max|e|: worst deviation (safety envelope)
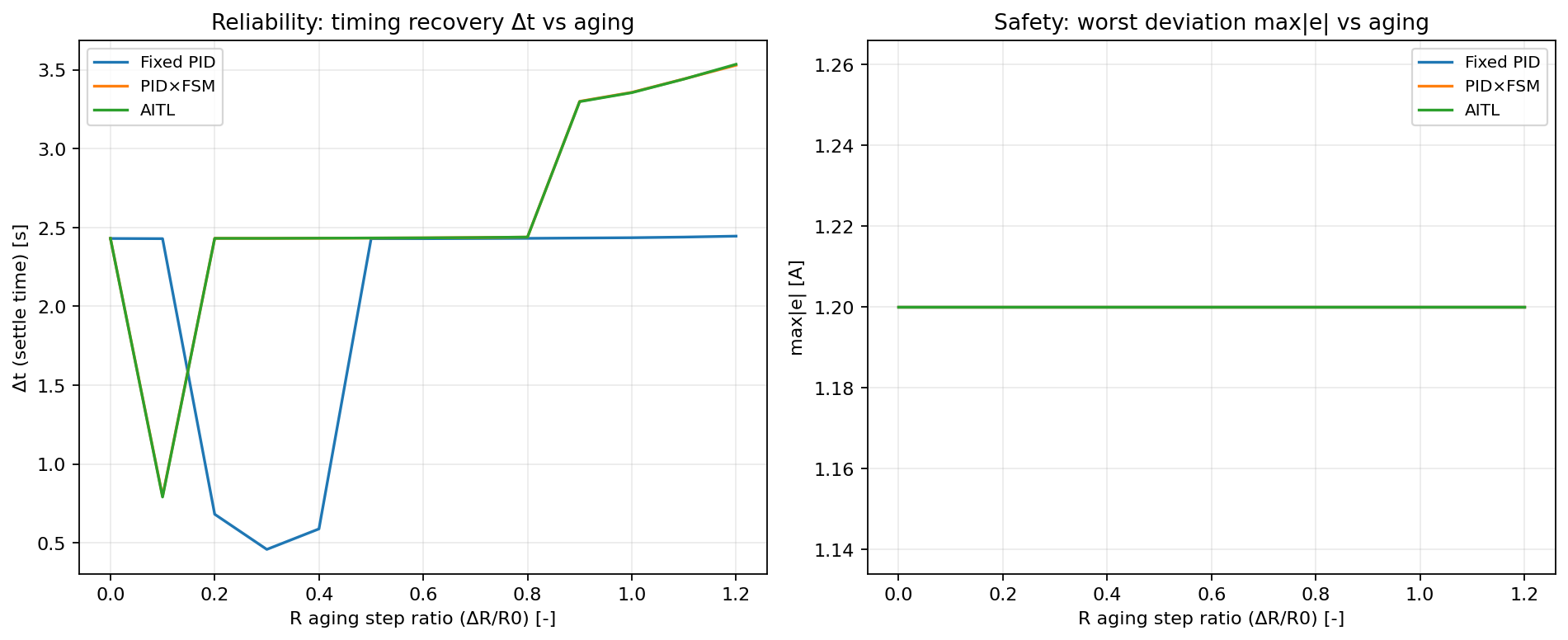
Interpretation
- Δt increases with aging for all controllers
- AITL maintains comparable safety (max|e|)
- Temporal reliability degradation becomes explicit and measurable
3️⃣ FSM Explainability — Why Adaptation Switched
Explicit visualization and logs explaining why FSM mode switches occurred, based on thresholded error magnitude.
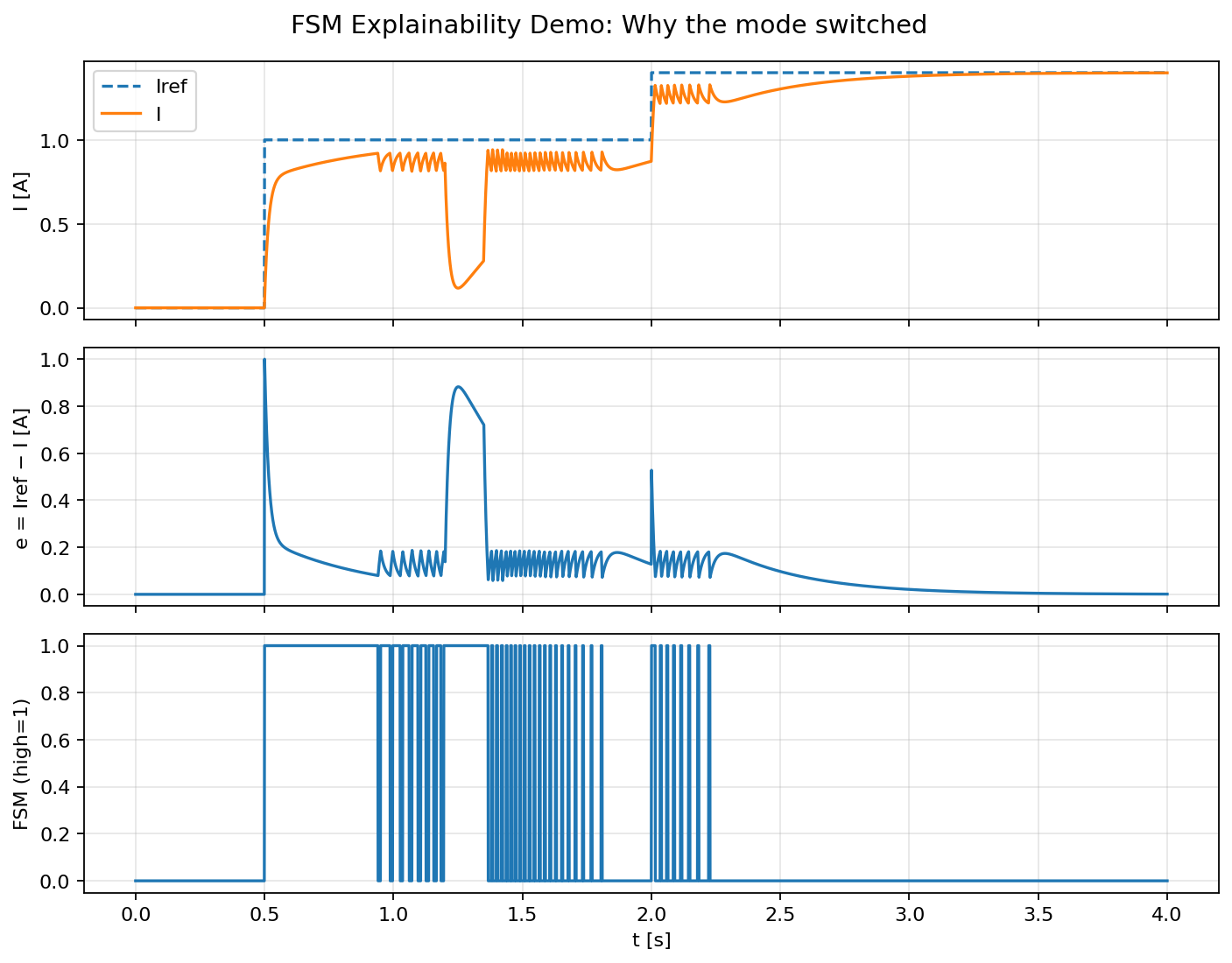
What this proves
- Supervisory decisions are deterministic
- Mode switches are auditable and timestamped
- FSM-based adaptation is not a black box
♻️ Reproducibility
All results shown above are generated by the following scripts:
demos/12_vi_current_control_sales_demo.pydemos/13_aging_sweep_delta_t.pydemos/15_fsm_explainability_demo.py
Generated figures are stored in:
data/12_vi_current_control_sales_demo.pngdata/13_aging_sweep_delta_t.pngdata/15_fsm_explainability_demo.png
No manual post-processing is applied.
🧠 Reliability Design Conclusion (Evidence-Based)
Based on the results above:
- adaptive control can compensate for aging-induced delay
- adaptation may degrade temporal reliability
- this degradation is detectable by design-time metrics (Δt)
- FSM-based logic can decide when adaptation should be stopped
These results define the design boundary of the A-Type controller and motivate a B-Type architecture explicitly designed for reliability control.
🧩 Key Design Message
Adaptive control is not automatically reliable.
In this study, AITL successfully compensates for delay,
but at the cost of:
- excessive lead (over-compensation)
- reduced motion authority
- and degraded overall reliability
Crucially, these effects are:
- not obvious from waveforms alone
- but become explicit through Δt, amplitude, and FSM logic
This distinction marks the boundary between
performance optimization and reliability-oriented design.
🧭 Navigation
▶ Detailed Demo Analyses (Reproducible Results)
-
Demo 12 — V–I Current Control under Aging & Disturbance
Phenomenological waveform comparison (Fixed PID / PID×FSM / AITL)
→ Results:data/12_vi_current_control_sales_demo.png
→ Code:demos/12_vi_current_control_sales_demo.py -
Demo 13 — Reliability Metrics vs Aging (Δt, max|e|)
Quantitative evaluation of temporal reliability and safety degradation
→ Results:data/13_aging_sweep_delta_t.png
→ Code:demos/13_aging_sweep_delta_t.py -
Demo 15 — FSM Explainability (Why Adaptation Switched)
Audit-ready visualization of supervisory decisions and thresholds
→ Results:data/15_fsm_explainability_demo.png
→ Code:demos/15_fsm_explainability_demo.py
These demos constitute the evidence layer supporting the reliability conclusions of the A-Type controller.
🖼 Reference Figure
- Timing degradation under friction aging
pid_vs_aitl_friction_aging.png
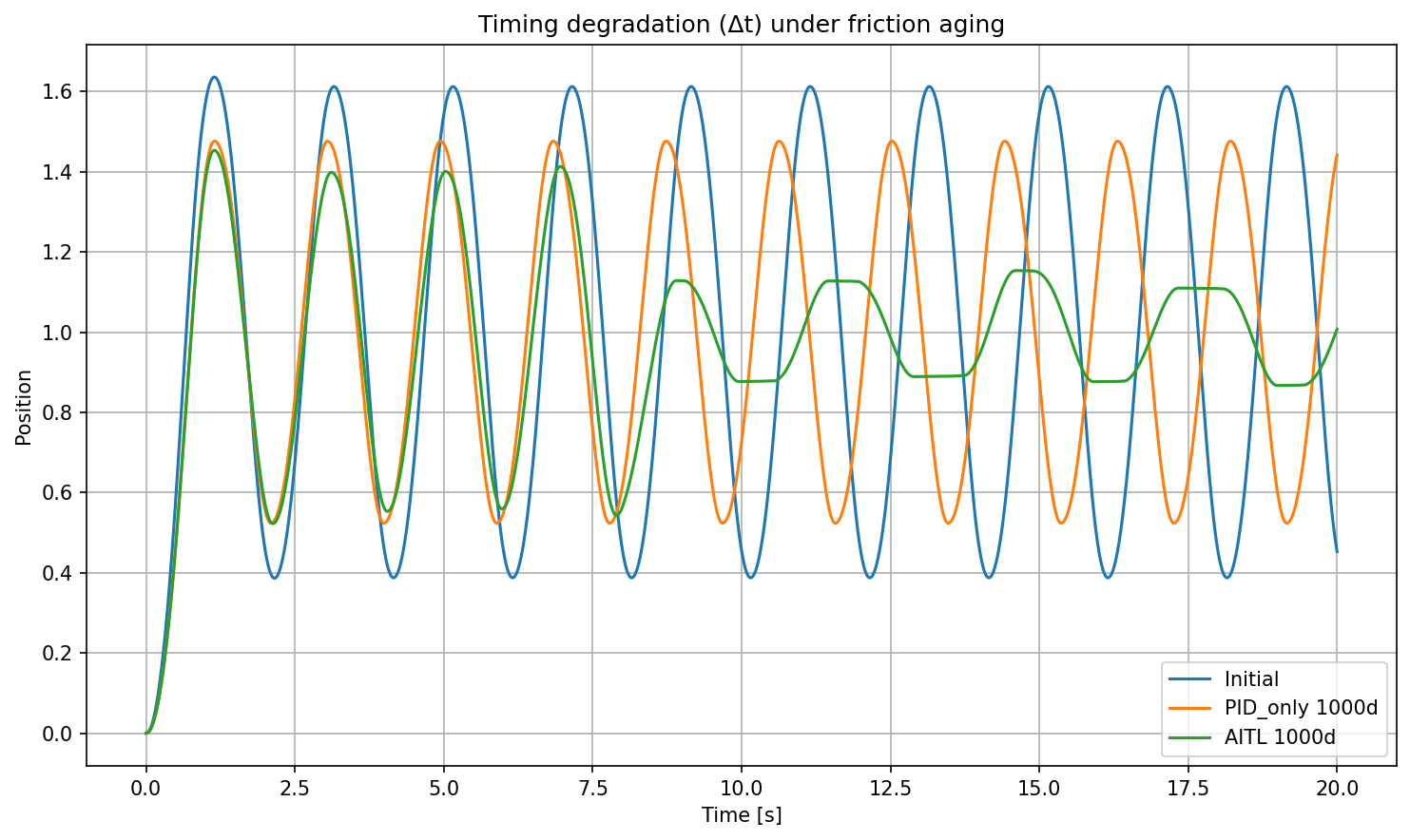{kind=link}
This figure provides a phenomenological overview only.
All reliability conclusions are derived from quantitative metrics
and FSM-based decisions described in the demos above.
🔗 Relation to Other Documentation
- This section corresponds to the Reliability Investigation
introduced briefly in the main documentation index. - The index page presents only representative conclusions.
- Detailed reasoning, metrics, and design implications are contained here.
✅ Summary
This reliability chapter demonstrates that:
- timing degradation can be quantified (Δt)
- authority loss can be detected (amplitude ratio)
- adaptive behavior can and should be stopped by design
The result is not a failure of AITL,
but a clear design boundary between:
Adaptive control
and
Reliable adaptive control
➡️ Design Implication and Next Step
The A-Type controller successfully demonstrated adaptive control capability under plant aging conditions.
While the feasibility of reliability-oriented control was investigated, the current A-Type architecture was not designed to guarantee reliability, as adaptive actions may degrade timing consistency and motion authority.
This result clarifies the design boundary of the A-Type controller and motivates the investigation of a B-Type architecture explicitly designed for reliability control, in which adaptive actions are evaluated and accepted only if overall reliability is improved.