🚀 OpenLane Superstable — SPM Flow Result
Verified Physical Design Flow (GDS → DEF/LEF → OpenROAD Visualization)
Links
| Language | GitHub Pages 🌐 | GitHub 💻 |
|---|---|---|
| 🇺🇸 English |
This directory documents a fully verified execution of OpenLane (superstable branch) using the example design SPM (Simple Processor Model).
The flow produced the following valid outputs:
- ✔️ Final GDS (
spm.gds) - ✔️ Final DEF / LEF
- ✔️ Layout visualization validated in OpenROAD GUI
- ✔️ Area report confirmed via OpenROAD (
report_design_area)
All results were generated inside the official OpenLane Docker container, without any source code modifications.
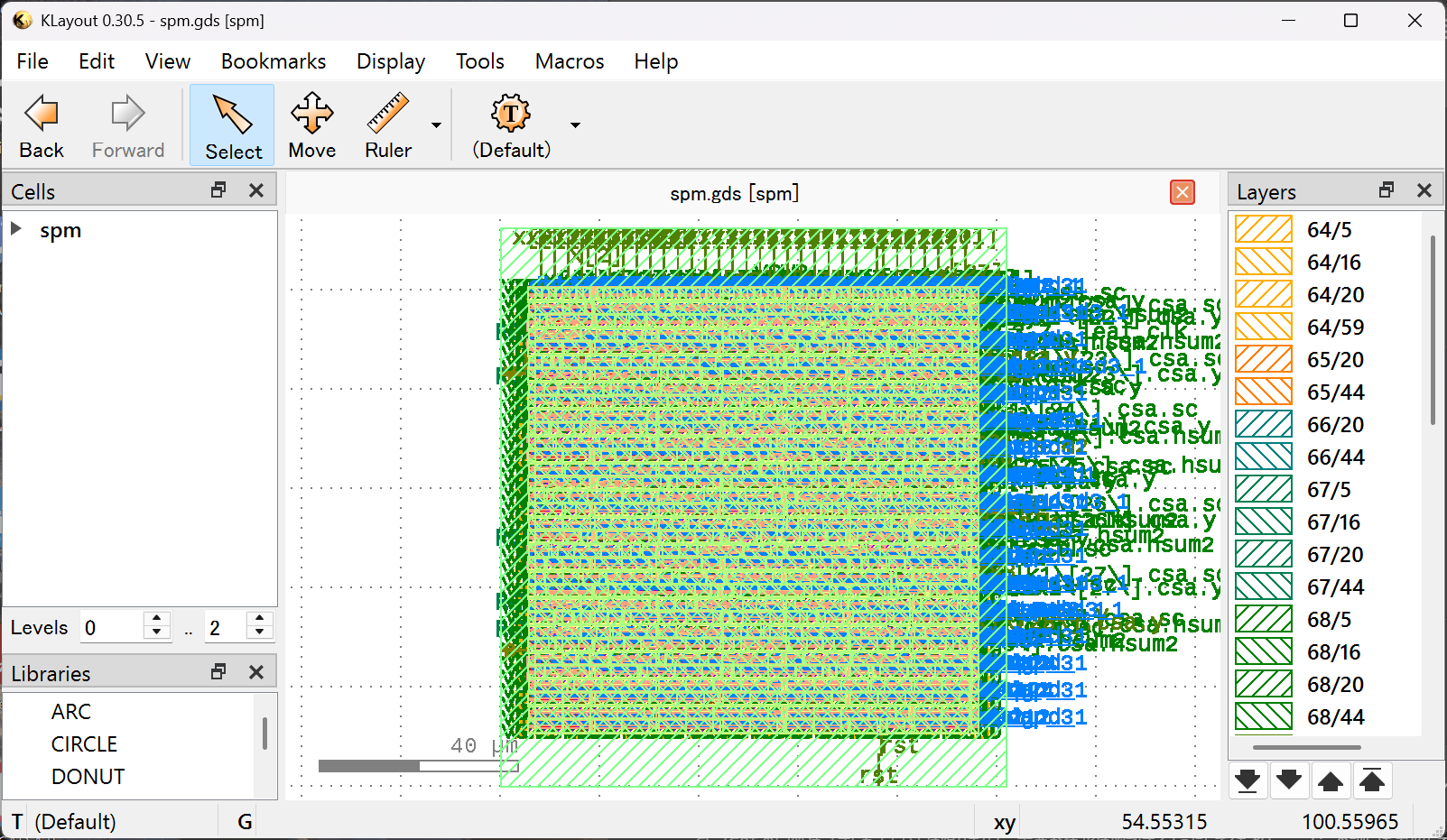
📐 1. Generated GDS Result (KLayout View)
Full-chip GDS layout
Transistor-level detail(poly/diffusion layers)
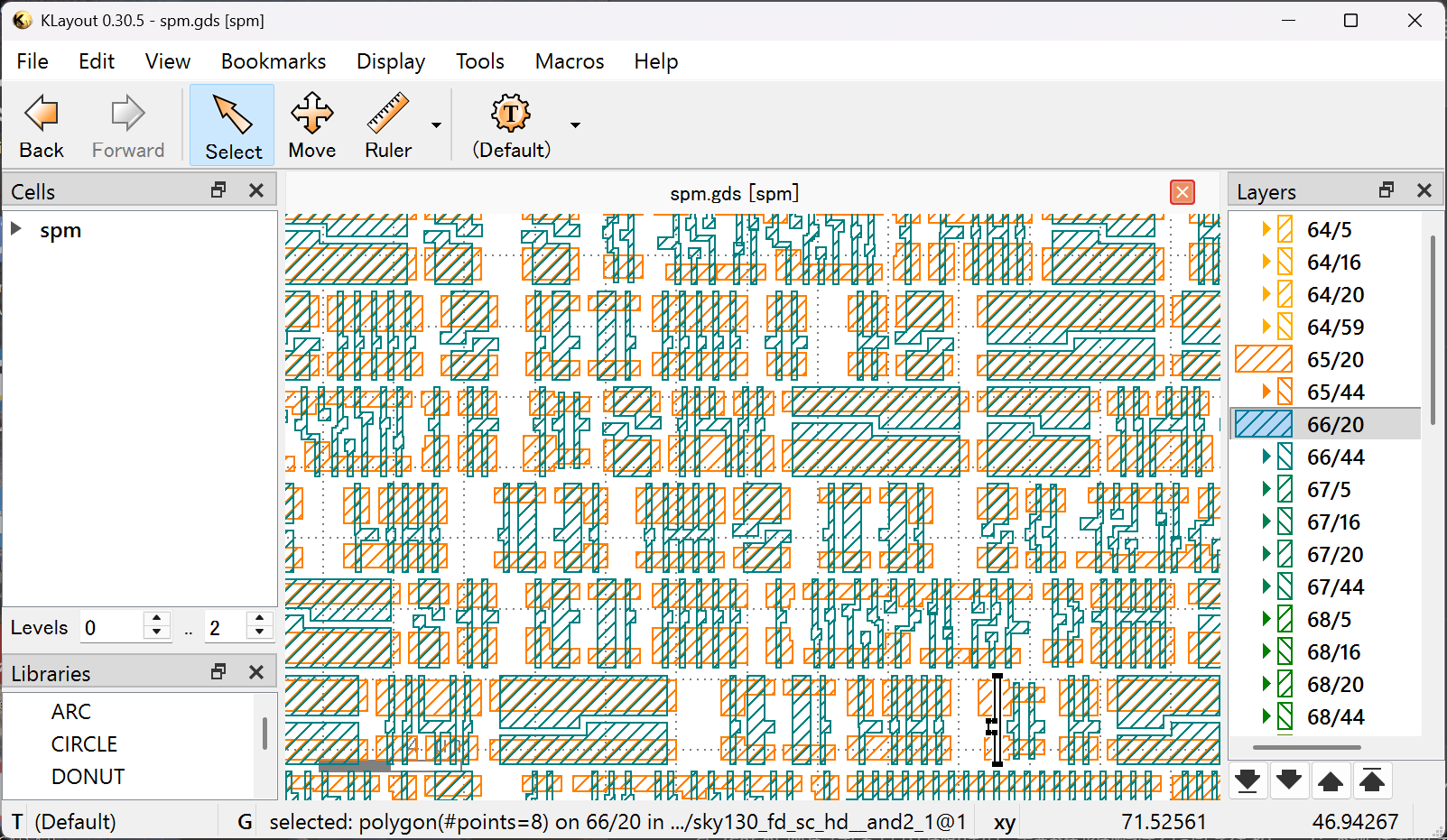
These screenshots confirm that:
- Standard cell placement is correct
- Routing layers (M1–M5) follow SKY130A design rules
- No missing polygons / GDS corruption
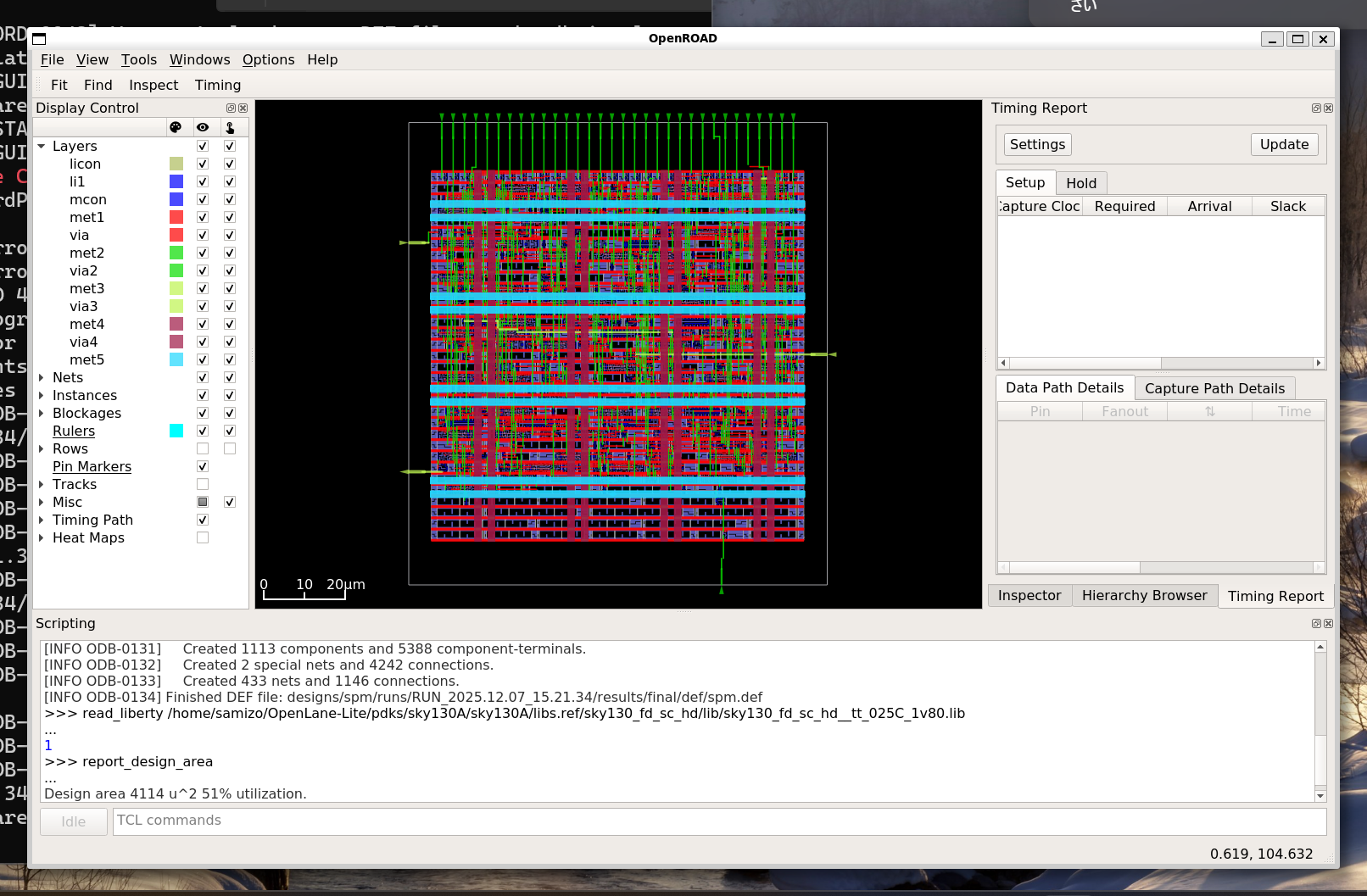
🖥️ 2. OpenROAD GUI — Successfully Loaded LEF/DEF
Global layout view
Detailed routing view
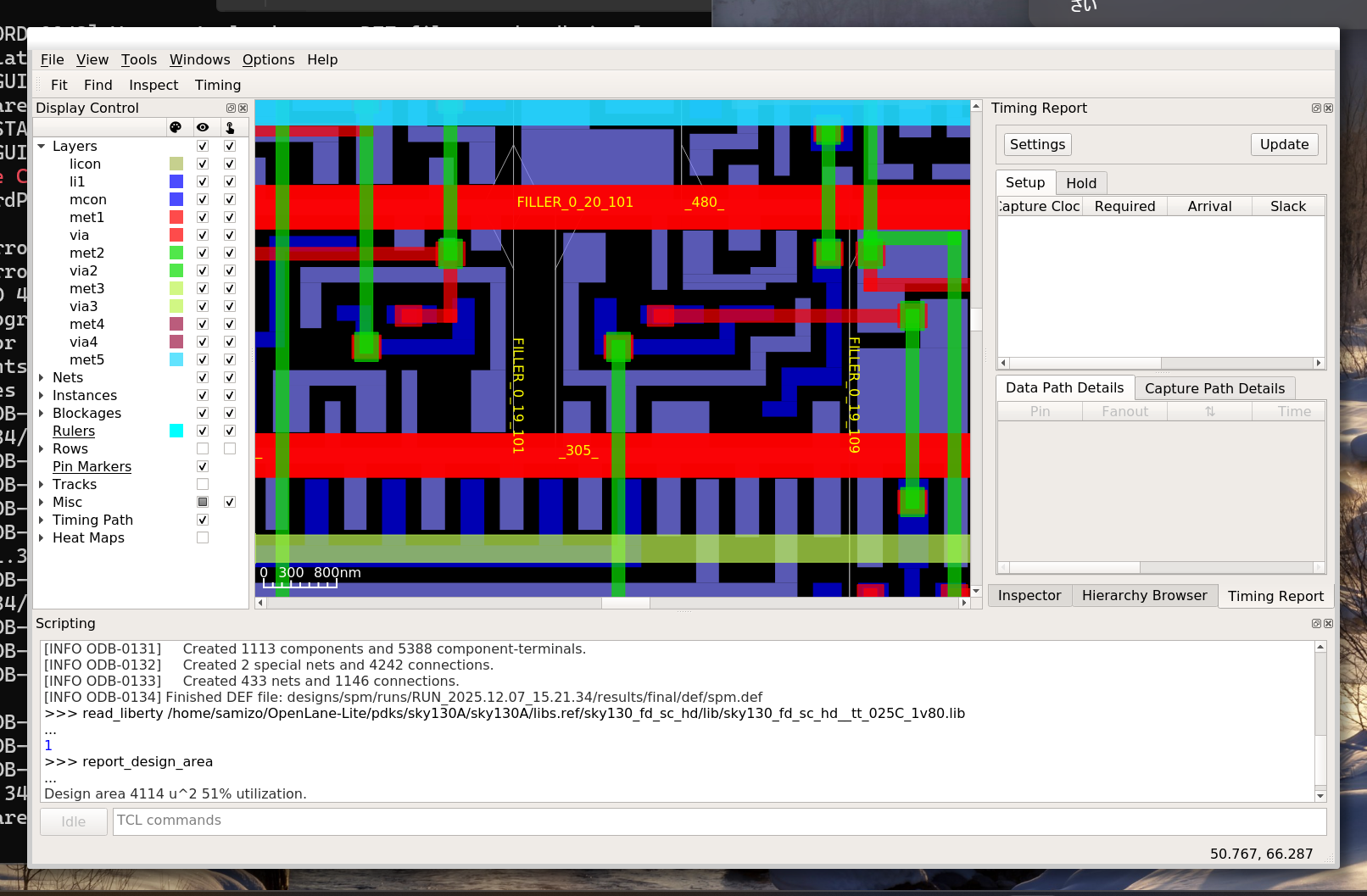
In OpenROAD GUI:
- DEF/LEF loads without warnings
- Layer visibility & routing geometry verified
- Filler cells / vias / standard cells correctly rendered
🧪 3. Commands Used (Inside OpenLane Container)
Start OpenROAD
openroad
Load technology (LEF) and placed-and-routed design (DEF)
read_lef designs/spm/runs/<RUN>/tmp/merged.nom.lef
read_def designs/spm/runs/<RUN>/results/final/def/spm.def
💡 <RUN> is typically auto-generated, e.g.:
RUN_2025.12.07_15.21.34
(Optional) Load Liberty for timing analysis
read_liberty /openlane/pdks/sky130A/sky130A/libs.ref/sky130_fd_sc_hd/lib/sky130_fd_sc_hd__tt_025C_1v80.lib
📊 4. Example Report Output
Design Area Report
OpenROAD successfully evaluates area after loading LEF/DEF:
report_design_area
Design area 4114 u^2 51% utilization.
Interpretation:
- 4114 μm² = total placed cell + routing area
- 51% utilization = healthy for SKY130 (target 50–60%)
📤 5. Export Options (Optional)
OpenROAD allows saving the database in multiple formats:
write_def out.def
write_lef out.lef
write_db out.db
Useful for:
- External STA tools
- KLayout / Magic cross-verification
- Downstream EDA workflows
📝 Notes
- Target design: SPM (Simple Processor Model)
- Environment: OpenLane “superstable”, revision
ff5509f - Platform: SKY130A PDK
- Execution environment: Official OpenLane Docker container
- No code changes; only standard OpenLane configs were used
- All results are reproducible with the provided commands
✔️ Summary
This directory shows a complete, validated RTL-to-GDS physical design run, including:
- GDS generation
- DEF/LEF export
- OpenROAD visualization
- Area report verification
It serves as a reference-quality example of OpenLane superstable being executed successfully on a real SKY130A design.
🧪 Self-made Minimal RTL Flow
- Design :
spm_min_counter - Intent :
Pre-declared minimal RTL design used to verify
OpenLane (superstable) stability with designer-authored RTL,
without relying on reference or example circuits. - Result :
✔ RTL → GDS flow completed successfully
✔ CTS and routing finished without manual intervention
➡ Flow details and artifacts:
spm_min_counter/
👤 Author
| Item | Details |
|---|---|
| 👨🔬 Name | Shinichi Samizo |
| 💻 GitHub | Samizo-AITL |
📄 License
| Component | License | Notes |
|---|---|---|
| 💻 Source Code | MIT License | Free use / modification |
| 📄 Text Materials | CC BY 4.0 / CC BY-SA 4.0 | Attribution required |
| 🎨 Figures & Diagrams | CC BY-NC 4.0 | Non-commercial only |
| 🔗 External References | Original license | Proper citation required |