💻 Part 04: デジタル制御と信号処理 / Digital Control & Signal Processing
🔗 公式リンク | Official Links
| 言語 / Language | GitHub Pages 🌐 | GitHub 💻 |
|---|---|---|
| 🇯🇵 日本語 / Japanese |
本章では、ディジタル実装を意識した制御設計と信号処理技術を体系的に学びます。
Z変換、離散PID、デジタルフィルタ、FFT解析など、実機マイコン制御にも直結する内容を扱います。
This chapter systematically covers control and signal processing techniques for digital implementation,
including Z-transform, discrete PID, digital filters, and FFT analysis—all applicable to real embedded control.
🎯 学習目標 / Learning Objectives
- サンプリング理論を理解し、離散制御の基礎を習得する
Understand sampling theory and the fundamentals of discrete control - Z変換による離散伝達関数を構築できる
Construct discrete transfer functions using Z-transform - 離散PID制御器を設計し、連続系と比較できる
Design discrete PID controllers and compare them with continuous counterparts - FIR/IIRフィルタを設計し、信号処理応用を体験する
Design FIR/IIR filters and experience their use in signal processing - FFTを用いた信号の周波数解析・雑音除去を実施する
Apply FFT to analyze frequency components and remove noise
📘 教材ファイル / Theory Materials theory/
| ファイル名 / File | 内容 / Description |
|---|---|
01_sampling_theory.md |
サンプリング定理とZOHの基礎 Sampling theorem and ZOH |
02_z_transform.md |
Z変換と離散時間伝達関数 Z-transform and discrete-time transfer functions |
03_digital_pid.md |
離散PID制御器の設計と比較 Design and comparison of discrete PID |
04_fir_iir_filter.md |
FIR/IIRフィルタの構造と設計法 FIR/IIR structure and design |
05_fft_analysis.md |
FFTによる信号の周波数分析と雑音除去 FFT for spectrum analysis and noise removal |
06_digital_hinf_control.md |
デジタルH∞制御の理論とMATLAB/Simulink実装例 Digital H∞ control theory with MATLAB/Simulink implementation |
🧪 シミュレーション / Simulation Scripts simulation/
| スクリプト名 / Script | 内容 / Description |
|---|---|
digital_pid.py |
離散PIDと連続PIDの比較シミュレーション Simulate and compare digital vs. continuous PID |
iir_fir_filter_demo.py (*) |
FIR/IIRフィルタの通過特性比較(予定) Planned: FIR/IIR filter response demo |
fft_noise_removal.py |
FFTによる雑音除去と信号再構成 Noise removal and reconstruction using FFT |
digital_hinf_matlab.m |
MATLABによる離散H∞制御設計と周波数応答評価 Digital H∞ control design in MATLAB with frequency response evaluation |
digital_hinf_simulink.slx |
Simulinkモデルによる離散H∞制御検証 Validation of digital H∞ control using Simulink model |
🖼️ 図・可視化 / Figures figures/
| ファイル名 / Figure | 内容 / Description |
|---|---|
digital_pid_response.png |
離散PIDと連続PIDのステップ応答比較 Step response: discrete vs. continuous PID |
fft_spectrum.png |
FFTによるスペクトル解析と除去後波形 FFT spectrum and filtered waveform |
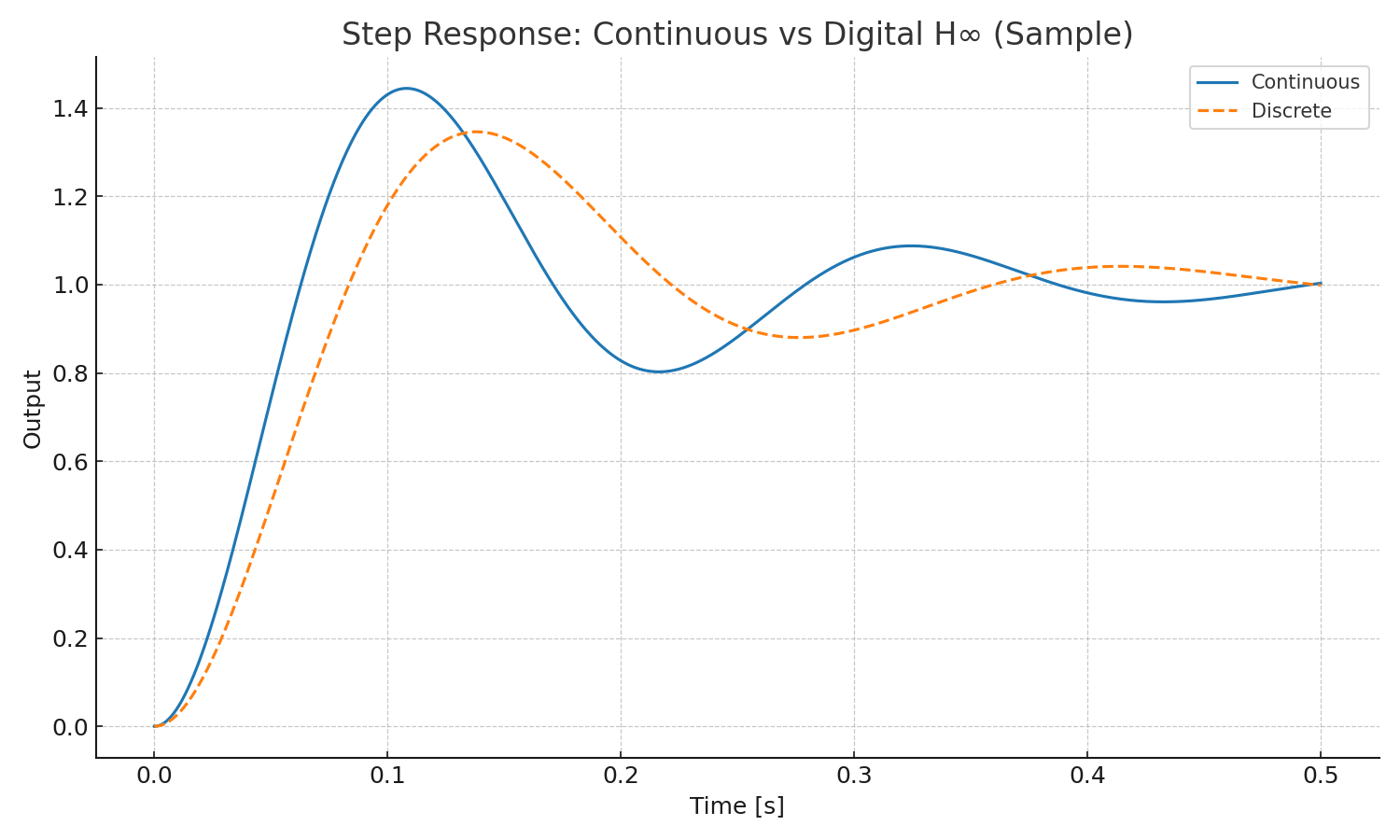
digital_hinf_step.png |
離散H∞制御のステップ応答 Step response of digital H∞ control |
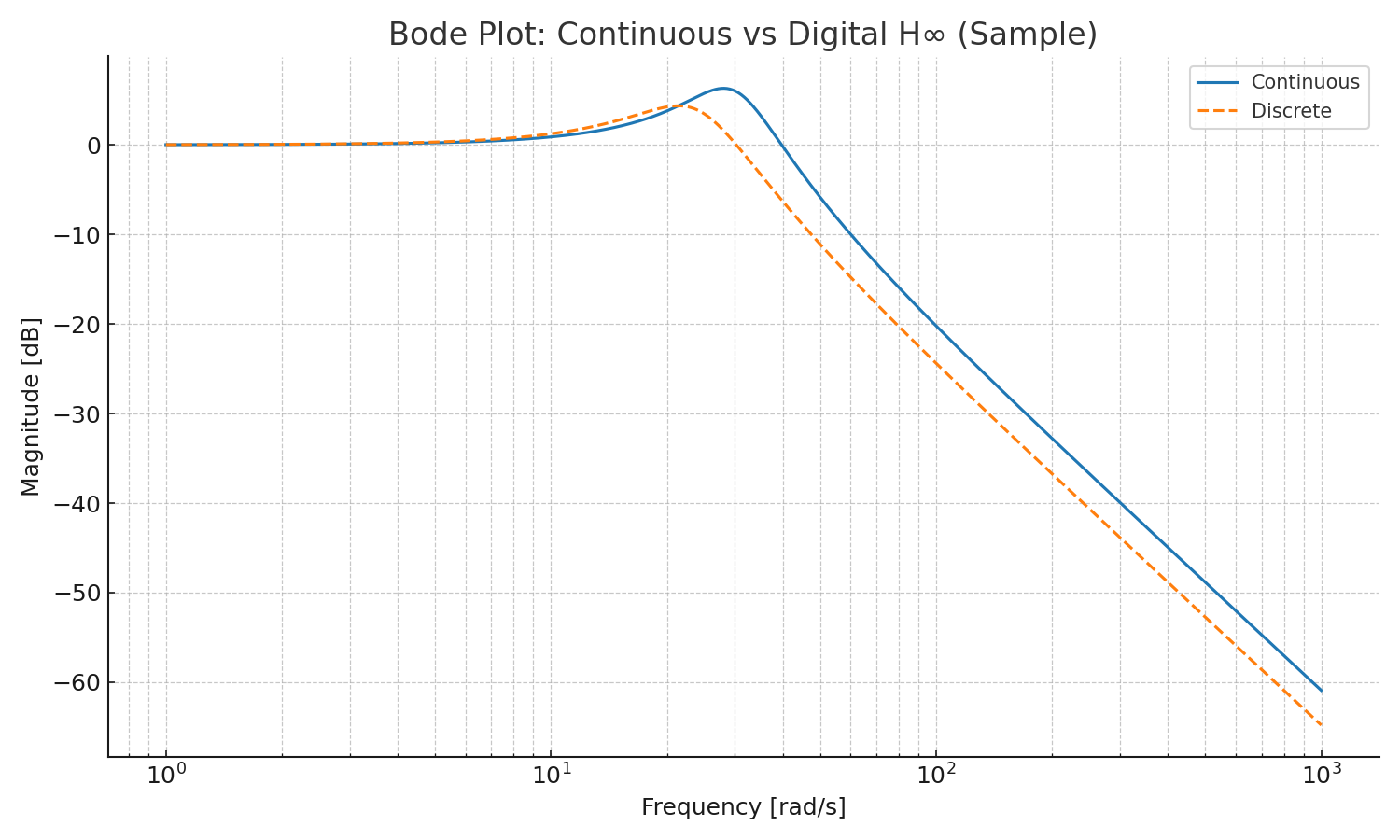
digital_hinf_bode.png |
離散H∞制御のBode線図 Bode plot of digital H∞ control |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
🧩 応用展開例 / Application Examples
| 分野 / Field | 応用内容 / Application |
|---|---|
| マイコン制御 / Microcontroller | 離散PIDやLPFを用いたセンサ信号処理 Sensor processing with PID/LPF |
| 振動抑制 / Vibration Control | FFTによる振動検出とアクティブ制御 FFT-based vibration analysis & control |
| 通信処理 / Communication | 周波数帯域の整形とノイズ分離 Band shaping and noise separation |
| FPGA処理 / FPGA Systems | FIR/IIRフィルタのハードウェア実装 Hardware implementation of digital filters |
🚧 今後の予定 / Upcoming Tasks
iir_fir_filter_demo.pyの補完とプロット整備
Complete FIR/IIR simulation and plottingnotebooks/ディレクトリに Jupyter Notebook 版を追加
Add interactive Jupyter Notebook versionsREADME_jp.mdの英日切替対応(GitHub Pages対応構想)
Add EN/JP toggle-ready structure for public view
👤 著者・ライセンス | Author & License
| 📌 項目 / Item | 📄 内容 / Details |
|---|---|
| 著者 / Author | 三溝 真一(Shinichi Samizo) |
| 💻 GitHub | |
| 📜 ライセンス / License | コード / Code: MIT 教材テキスト / Text: CC BY 4.0 図表 / Figures: CC BY-NC 4.0 |
⬅️ 前章 / Previous Chapter
適応制御(MRAC)、ロバスト制御(H∞、L1)など、パラメータ変動や外乱に強い制御法を扱います。
Covers adaptive control (MRAC) and robust control methods (H∞, L1) designed to handle parameter variations and disturbances.
次章 / Next Chapter ➡️➡️
Pythonによる制御系実装、ROSを用いたロボット制御演習、FPGAによる制御ハードウェア化を学びます。
Covers control system implementation in Python, robot control exercises using ROS, and FPGA-based hardware realization.