AITL-H
🧠 AITL-H Theory – 構造的制御アーキテクチャの理論基盤
AITL-H は、人型ロボットなど複雑な制御対象に対し、FSM(本能)+ PID(理性)+ LLM(知性) の三層で構成されるハイブリッド制御アーキテクチャです。
このフォルダでは、それぞれの制御層の理論背景と相互作用を記述します。
📐 構成概要
AITL-H のアーキテクチャは以下の三層で構成されます:
| 層 | 概要 | 対応技術 | 担当役割 |
|---|---|---|---|
| 第1層:物理層(低層制御) | 現実世界の物理量を制御 | PID制御、H∞制御、センサ信号処理 | 安定な運動・姿勢・温度制御など |
| 第2層:制御層(中間論理) | 状態遷移・制御ロジック | FSM(有限状態機械)、状態管理テーブル | 行動の流れ制御(立ち上がり→歩行→停止) |
| 第3層:推論層(上位判断) | 高次判断と対話制御 | LLM、推論エンジン、異常予測モデル | 状況判断、対話応答、自己改善指示 |
🔁 三層の相互関係(構造図)
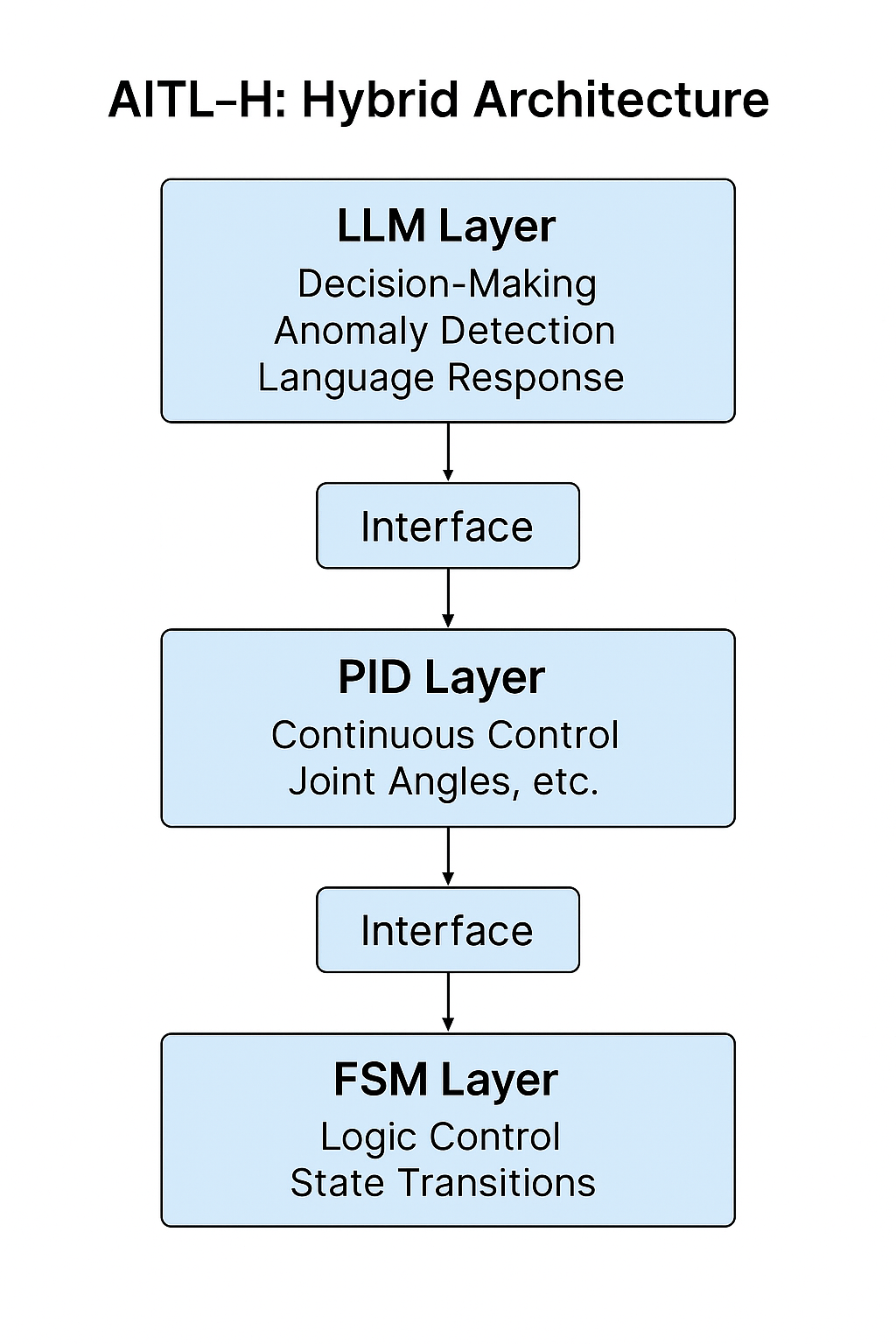
🔍 上図は
theory/llm/,fsm/,pid/に対応した制御層の構造を示しています。
📚 理論サブモジュール一覧
| サブモジュール | 内容 | リンク |
|---|---|---|
| FSM(制御層) | 有限状態機械による論理的な動作制御 | theory/fsm/ |
| PID制御(物理層) | アクチュエータ出力を安定に保つための制御理論 | theory/pid/ |
| LLM(推論層) | 自然言語理解と高度な行動判断を担う知性層 | theory/llm/ |
🧭 応用への展開例
- LLMによるFSM状態の自動生成と最適化
- FSMによる行動パターン切替と異常時フェイルセーフ設計
- PID + H∞ 制御による環境変動対応の滑らかな出力制御
- 3層連携による「知能と制御の融合PoC」への展開
✍️ 制作者情報
技術構想・執筆:三溝 真一(Shinichi Samizo)
GitHub: Samizo-AITL
Email: shin3t72@gmail.com
📄 ライセンス
本理論構成と資料は MIT License のもと公開されています。