AITL-H
🤖 AITL-H: Hybrid Structured Control Framework
AITL-H (All-in-Theory Logic - Hybrid) is a hierarchical intelligent control architecture designed for humanoid robots and adaptive systems.
It integrates three layers: FSM (Instinct) × PID (Reason) × LLM (Intelligence) to achieve control with responsiveness, stability, and flexibility.
- 🇯🇵 日本語版 READMEはこちら
→ AITL-H:FSM × PID × LLM による階層型知能制御アーキテクチャの解説とPoC実装
🧭 Overview
| Item | Description |
|---|---|
| Name | AITL-H (Hybrid) |
| Purpose | Establish intelligent control methods for humanoid systems |
| Core Logic | - FSM: Instinctive behavior control via state transitions - PID: Continuous control of physical quantities (angles, speed) - LLM: Intelligent judgment, conversation, and adaptation |
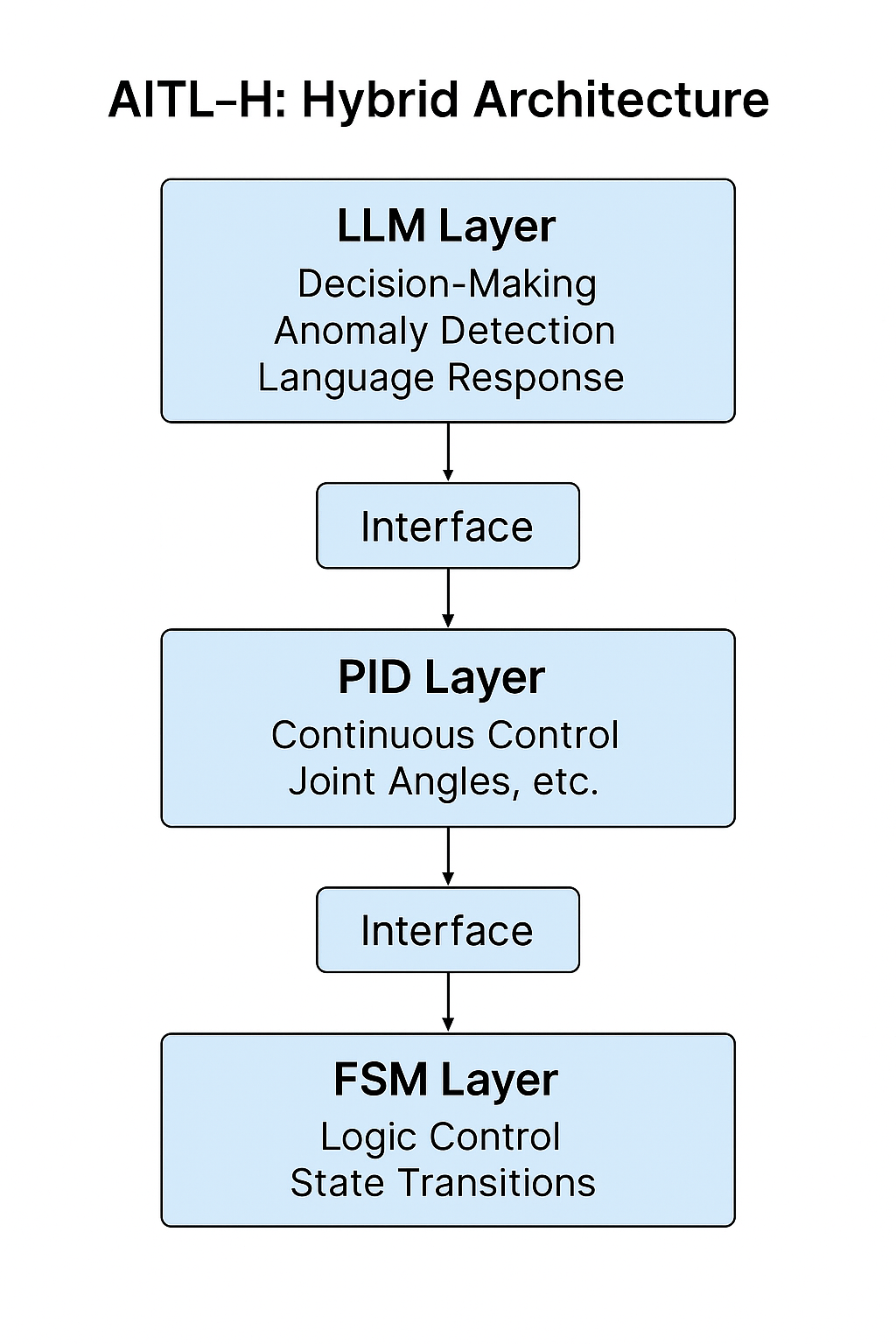
🧘 Three-Layer Architecture
| Layer | Function | Implementation Example |
|---|---|---|
| FSM | Logic control via state machines | fsm_engine.py, fsm_state_def.yaml |
| PID | Physical control (joints, motion) | pid_controller.py, pid_module.py |
| LLM | Judgment, anomaly detection, language interaction | llm_interface.py, llm_logger.py |
Each layer is loosely coupled yet coordinated, allowing independent development and gradual integration.
📘 PoC Design Manual (16 Chapters)
A complete PoC design manual for humanoid systems using FSM × PID × LLM is available:
▶︎ 📖 View Manual
🧪 List of PoC Projects
| Title | Summary | Path |
|---|---|---|
| 🧭 Gimbal Control (FSM + PID + LLM) | Hybrid closed-loop control | PoC/gimbal_control |
| 🔍 Additional PoCs | Coming soon | - |
🧪 Example: 3-Axis Gimbal Control with FSM × PID × LLM (AITL-HX)
Proof-of-concept for gimbal control using the AITL-HX architecture.
Natural language command → FSM transition → PID stabilization → Actuator output.
📂 Directory: PoC/gimbal_control/
📘 Details: See README

| Component | Description |
|---|---|
| LLM Layer | Goal generation and intent recognition from natural language |
| FSM Layer | State transitions (idle, follow, recovery) |
| PID Layer | PID control of roll, pitch, yaw |
| Sensor Layer | 3-axis IMU model for attitude estimation |
| Actuator Layer | Motor output control via PWM (simulated) |
🧭 Key Learning Points:
- Full-stack design of hybrid FSM + PID + LLM control
- Translating natural language into control objectives
- Implementing closed-loop intelligent control with MIMO and state coordination
🤖 ChatGPT Integration: Collaborative Design Tools
In the accelerated_design/ directory, tools utilizing ChatGPT support the design process:
- Auto FSM generation (Prompt → FSM YAML)
- Test scenario creation & log visualization
- Auto documentation and review assistance
🧠 Experimental environment for human-AI collaborative design.
📂 Directory Structure
AITL-H/
├── theory/ # Architecture concepts and design principles
├── PoC/ # PoC source codes, logs, and verification
├── implementary/ # Python implementations of FSM/PID/LLM modules
└── accelerated_design/ # ChatGPT-based design support tools
| Directory | Description |
|---|---|
theory/ |
Theoretical background and design rationale |
PoC/ |
Control scenarios, logging, and evaluation |
implementary/ |
FSM, PID, communication, and LLM integration code |
accelerated_design/ |
Design assistance tools and log processors |
🚀 Application Domains
- 🧓 Elderly Care Robots: Emotion-aware physical control
- 🛠 Self-Evolving Control: Anomaly detection and feedback optimization via LLM
- 🌏 Disaster Response Robots: Combining predefined behavior and inference
- 🎓 Education & Research: Ideal platform for AI × control learning
🎓 Educational Integration: Linked with EduController
AITL-H’s theoretical basis aligns with Chapter 9 of EduController, a control theory learning platform.
| Part | Content | Relevance to AITL-H |
|---|---|---|
| Part 1–5 | Classical to modern control | Foundation of PID layer |
| Part 6–8 | Neural nets, reinforcement learning | AI control integration |
| Part 9 | FSM × PID × LLM Hybrid Control | Directly implements AITL-H architecture |
🧩 SoC-Level Expansion: Linked with Edusemi
To extend PoC into SoC design, RTL implementation, and physical layout, refer to the Special Topics in the Edusemi v4.x project.
| Chapter | Content |
|---|---|
| Ch.3 | SoC design of FSM × PID × LLM architecture |
| Ch.4 | RTL-to-GDSII with OpenLane |
| Ch.5 | Physical verification and DFM strategies |
📚 Related Projects
- Edusemi v4.x: Semiconductor / SoC design education
- EduController: Control theory to AI control learning platform
- Rekiden: History-based simulation using FSM (educational SLG)
👤 Author Profile
- Name: Shinichi Samizo
- Education: M.E. in Electrical and Electronic Engineering, Shinshu University
- Career:
- Joined Seiko Epson in 1997
- Roles included:
- Logic/memory development (0.35μm to 0.18μm)
- High-voltage CMOS integration and AMS design
- TFP and PrecisionCore commercialization
📧 shin3t72@gmail.com
🔗 GitHub: Samizo-AITL
© 2025 Shinichi Samizo — MIT License
All source code, documentation, and architecture diagrams are provided under the MIT License.
💬 Share feedback or join the discussion: AITL-H Discussions